|
OROCHI
|

|
|
OROCHI
|
|
クォータニオン More...
#include <GxQuaternion.h>
Public Member Functions | |
初期化 | |
| GxQuaternion (void) | |
| デフォルトコンストラクタ | |
| GX_FORCE_INLINE | GxQuaternion (f32 x, f32 y, f32 z, f32 w) |
| コンストラクタ | |
| GX_FORCE_INLINE | GxQuaternion (const GxFloat4 &float4) |
| コンストラクタ | |
| GX_FORCE_INLINE | GxQuaternion (const f32 *pFloatArray) |
| コンストラクタ | |
| GX_FORCE_INLINE | GxQuaternion (const GxVector3 &vector, f32 w) |
| コンストラクタ | |
| GX_FORCE_INLINE | GxQuaternion (const GxVector4 &vector) |
| コンストラクタ | |
| GX_FORCE_INLINE | GxQuaternion (const GxMatrixAffine &matrix) |
| コンストラクタ | |
| GX_FORCE_INLINE | GxQuaternion (const GxMatrix44 &matrix) |
| コンストラクタ | |
| GX_FORCE_INLINE | GxQuaternion (const GxQuaternion &quaternion) |
| コピーコンストラクタ | |
操作 | |
| GX_FORCE_INLINE const GxQuaternion & | addScalar (f32 scalar) |
| スカラ加算 | |
| GX_FORCE_INLINE const GxQuaternion & | subScalar (f32 scalar) |
| スカラ減算 | |
| GX_FORCE_INLINE const GxQuaternion & | mulScalar (f32 scalar) |
| スカラ乗算 | |
| GX_FORCE_INLINE const GxQuaternion & | divScalar (f32 scalar) |
| スカラ除算 | |
| GX_FORCE_INLINE const GxQuaternion & | addQuaternion (const GxQuaternion &quaternion) |
| クォータニオン加算 | |
| GX_FORCE_INLINE const GxQuaternion & | subQuaternion (const GxQuaternion &quaternion) |
| クォータニオン減算 | |
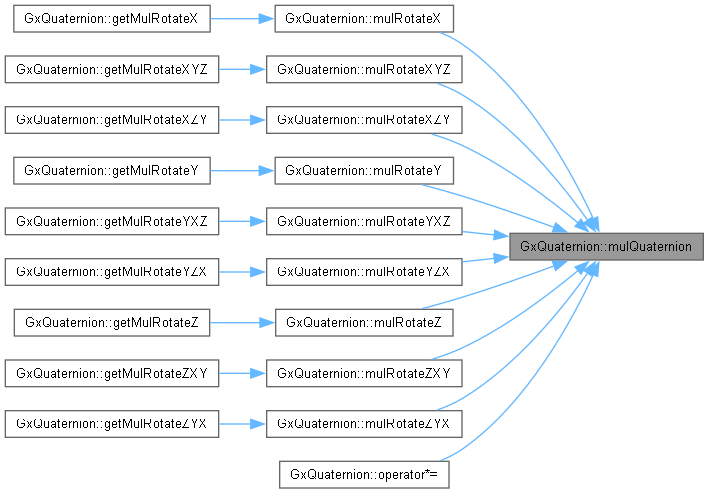
| GX_FORCE_INLINE const GxQuaternion & | mulQuaternion (const GxQuaternion &quaternion) |
| クォータニオン乗算 | |
| GX_FORCE_INLINE const GxQuaternion & | normalize (void) |
| 正規化する | |
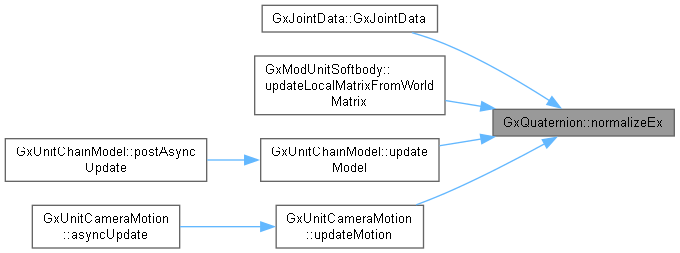
| GX_FORCE_INLINE const GxQuaternion & | normalizeEx (void) |
| 正規化する(長さ0に対応) | |
| GX_FORCE_INLINE const GxQuaternion & | conjugate (void) |
| 共役クォータニオンを計算する | |
| GX_FORCE_INLINE const GxQuaternion & | inverse (void) |
| 逆クォータニオンを計算する | |
| GX_FORCE_INLINE const GxQuaternion & | mulRotateX (f32 radian) |
| X軸回転乗算 | |
| GX_FORCE_INLINE const GxQuaternion & | mulRotateY (f32 radian) |
| Y軸回転乗算 | |
| GX_FORCE_INLINE const GxQuaternion & | mulRotateZ (f32 radian) |
| Z軸回転乗算 | |
| GX_FORCE_INLINE const GxQuaternion & | mulRotateXYZ (f32 radianX, f32 radianY, f32 radianZ) |
| XYZ軸回転乗算 | |
| GX_FORCE_INLINE const GxQuaternion & | mulRotateXZY (f32 radianX, f32 radianY, f32 radianZ) |
| XZY軸回転乗算 | |
| GX_FORCE_INLINE const GxQuaternion & | mulRotateYXZ (f32 radianX, f32 radianY, f32 radianZ) |
| YXZ軸回転乗算 | |
| GX_FORCE_INLINE const GxQuaternion & | mulRotateYZX (f32 radianX, f32 radianY, f32 radianZ) |
| YZX軸回転乗算 | |
| GX_FORCE_INLINE const GxQuaternion & | mulRotateZXY (f32 radianX, f32 radianY, f32 radianZ) |
| ZXY軸回転乗算 | |
| GX_FORCE_INLINE const GxQuaternion & | mulRotateZYX (f32 radianX, f32 radianY, f32 radianZ) |
| ZYX軸回転乗算 | |
Public Attributes | |
メンバ変数 | |
| f32 | _x |
| X値 | |
| f32 | _y |
| Y値 | |
| f32 | _z |
| Z値 | |
| f32 | _w |
| W値 | |
Static Public Attributes | |
定義 | |
| static constexpr u32 | DIMENSION = 4 |
| 次元数 | |
| static const GxQuaternion | ZERO |
| 0クォータニオン | |
| static const GxQuaternion | IDENTITY |
| 正規クォータニオン | |
演算子 | |
| GX_FORCE_INLINE GxQuaternion & | operator= (const GxQuaternion &quaternion) |
| 代入 | |
| GX_FORCE_INLINE GxQuaternion & | operator+= (f32 scalar) |
| スカラ加算代入 | |
| GX_FORCE_INLINE GxQuaternion & | operator-= (f32 scalar) |
| スカラ減算代入 | |
| GX_FORCE_INLINE GxQuaternion & | operator*= (f32 scalar) |
| スカラ乗算代入 | |
| GX_FORCE_INLINE GxQuaternion & | operator/= (f32 scalar) |
| スカラ除算代入 | |
| GX_FORCE_INLINE GxQuaternion & | operator+= (const GxQuaternion &quaternion) |
| クォータニオン加算代入 | |
| GX_FORCE_INLINE GxQuaternion & | operator-= (const GxQuaternion &quaternion) |
| クォータニオン減算代入 | |
| GX_FORCE_INLINE GxQuaternion & | operator*= (const GxQuaternion &quaternion) |
| クォータニオン乗算代入 | |
| GX_FORCE_INLINE const GxQuaternion | operator+ (const GxQuaternion &quaternion) |
| 正クォータニオン | |
| GX_FORCE_INLINE const GxQuaternion | operator- (const GxQuaternion &quaternion) |
| 負クォータニオン | |
| GX_FORCE_INLINE const GxQuaternion | operator+ (const GxQuaternion &quaternion, f32 scalar) |
| スカラ加算 | |
| GX_FORCE_INLINE const GxQuaternion | operator- (const GxQuaternion &quaternion, f32 scalar) |
| スカラ減算 | |
| GX_FORCE_INLINE const GxQuaternion | operator* (const GxQuaternion &quaternion, f32 scalar) |
| スカラ乗算 | |
| GX_FORCE_INLINE const GxQuaternion | operator* (f32 scalar, const GxQuaternion &quaternion) |
| スカラ乗算 | |
| GX_FORCE_INLINE const GxQuaternion | operator/ (const GxQuaternion &quaternion, f32 scalar) |
| スカラ除算 | |
| GX_FORCE_INLINE const GxQuaternion | operator+ (const GxQuaternion &quaternion0, const GxQuaternion &quaternion1) |
| クォータニオン加算 | |
| GX_FORCE_INLINE const GxQuaternion | operator- (const GxQuaternion &quaternion0, const GxQuaternion &quaternion1) |
| クォータニオン減算 | |
| GX_FORCE_INLINE const GxQuaternion | operator* (const GxQuaternion &quaternion0, const GxQuaternion &quaternion1) |
| クォータニオン乗算 | |
| GX_FORCE_INLINE b32 | operator== (const GxQuaternion &quaternion0, const GxQuaternion &quaternion1) |
| 一致 | |
| GX_FORCE_INLINE b32 | operator!= (const GxQuaternion &quaternion0, const GxQuaternion &quaternion1) |
| 不一致 | |
アクセサ | |
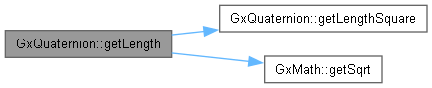
| GX_FORCE_INLINE f32 | getLength (void) const |
| 長さを取得 | |
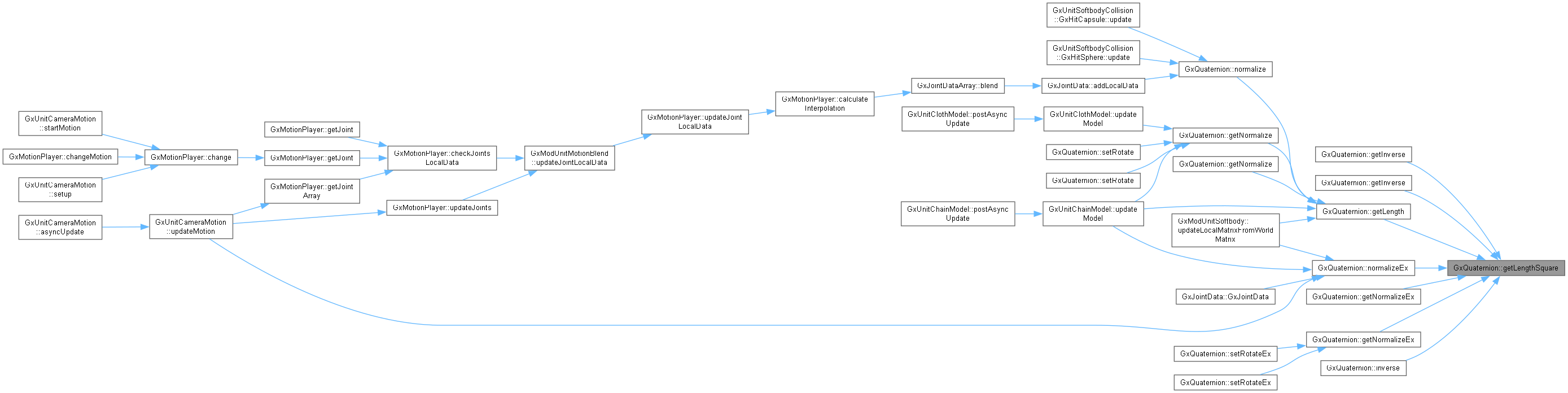
| GX_FORCE_INLINE f32 | getLengthSquare (void) const |
| 長さの2乗を取得 | |
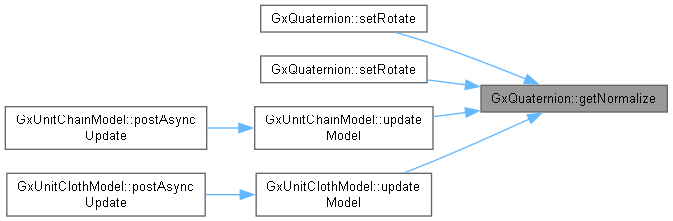
| GX_FORCE_INLINE GxQuaternion | getNormalize (void) const |
| 正規化クォータニオンを取得 | |
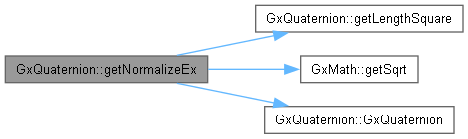
| GX_FORCE_INLINE GxQuaternion | getNormalizeEx (void) const |
| 正規化クォータニオンを取得(長さ0に対応) | |
| GX_FORCE_INLINE GxQuaternion | getConjugate (void) const |
| 共役クォータニオンを取得 | |
| GX_FORCE_INLINE GxQuaternion | getInverse (void) const |
| 逆クォータニオンを取得 | |
| GX_FORCE_INLINE GxVector3 | getRotate (void) const |
| 回転を取得 | |
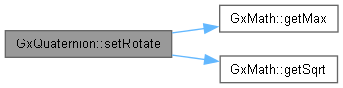
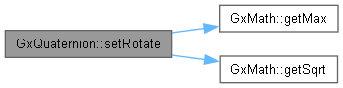
| GX_FORCE_INLINE void | setRotate (const GxVector3 &vector) |
| 回転を設定(ベクトル指定) | |
| void | setRotate (const GxMatrixAffine &matrix) |
| 回転を設定(マトリクス指定) | |
| void | setRotate (const GxMatrix44 &matrix) |
| 回転を設定(マトリクス指定) | |
| void | setRotate (const GxVector3 &axis, f32 radian) |
| 回転を設定(軸、角度指定) | |
| void | setRotate (f32 yaw, f32 pitch, f32 roll) |
| 回転を設定(ヨー角、ピッチ角、ロール角指定) | |
| void | setRotate (const GxVector3 &startVector, const GxVector3 &targetVector) |
| 回転を設定(開始ベクトル、目標ベクトル指定) | |
| void | setRotate (const GxVector3 &startVector, const GxVector3 &targetVector, f32 radian) |
| 回転を設定(開始ベクトル、目標ベクトル、角度指定) | |
| void | setRotate (const GxVector3 &axis, const GxVector3 &startVector, const GxVector3 &targetVector, f32 radian) |
| 回転を設定(軸、開始ベクトル、目標ベクトル、角度指定) | |
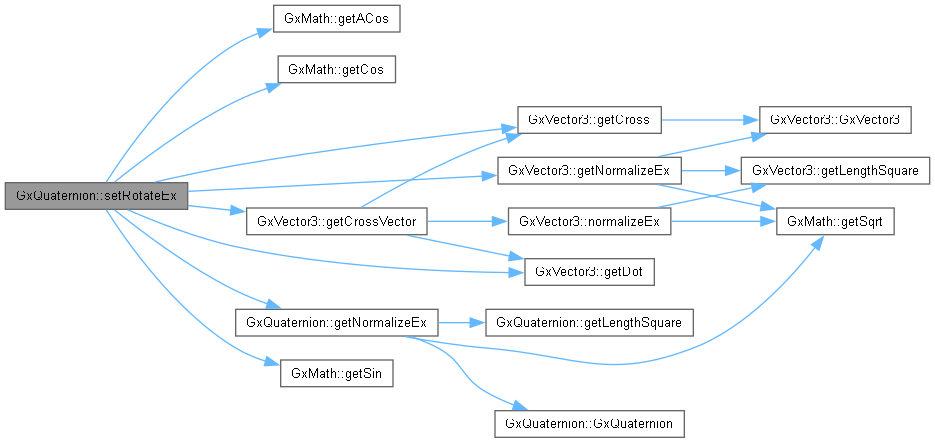
| void | setRotateEx (const GxVector3 &axis, f32 radian) |
| 回転を設定(軸、角度指定、長さ0ベクトルに対応) | |
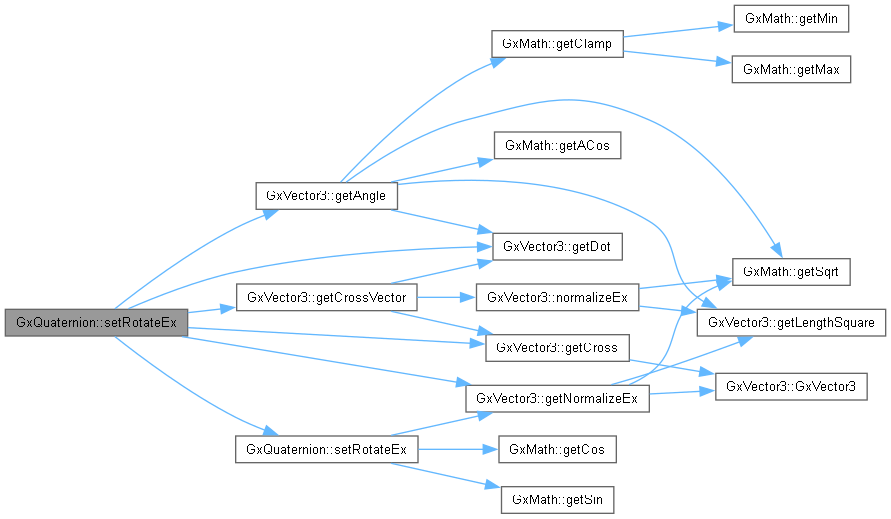
| void | setRotateEx (const GxVector3 &startVector, const GxVector3 &targetVector) |
| 回転を設定(開始ベクトル、目標ベクトル指定、長さ0ベクトルに対応) | |
| void | setRotateEx (const GxVector3 &startVector, const GxVector3 &targetVector, f32 radian) |
| 回転を設定(開始ベクトル、目標ベクトル、角度指定、長さ0ベクトルに対応) | |
| void | setRotateEx (const GxVector3 &axis, const GxVector3 &startVector, const GxVector3 &targetVector, f32 radian) |
| 回転を設定(軸、開始ベクトル、目標ベクトル、角度指定、長さ0ベクトルに対応) | |
| GX_FORCE_INLINE void | setRotateX (f32 radian) |
| X軸回転を設定 | |
| GX_FORCE_INLINE void | setRotateY (f32 radian) |
| Y軸回転を設定 | |
| GX_FORCE_INLINE void | setRotateZ (f32 radian) |
| Z軸回転を設定 | |
| GX_FORCE_INLINE void | setRotateXYZ (f32 x, f32 y, f32 z) |
| XYZ軸回転を設定 | |
| GX_FORCE_INLINE void | setRotateXZY (f32 x, f32 y, f32 z) |
| XZY軸回転を設定 | |
| GX_FORCE_INLINE void | setRotateYXZ (f32 x, f32 y, f32 z) |
| YXZ軸回転を設定 | |
| GX_FORCE_INLINE void | setRotateYZX (f32 x, f32 y, f32 z) |
| YZX軸回転を設定 | |
| GX_FORCE_INLINE void | setRotateZXY (f32 x, f32 y, f32 z) |
| ZXY軸回転を設定 | |
| GX_FORCE_INLINE void | setRotateZYX (f32 x, f32 y, f32 z) |
| ZYX軸回転を設定 | |
| static GX_FORCE_INLINE const GxQuaternion & | getAddScalar (GxQuaternion &dst, const GxQuaternion &quaternion, f32 scalar) |
| スカラ加算を取得 | |
| static GX_FORCE_INLINE const GxQuaternion & | getSubScalar (GxQuaternion &dst, const GxQuaternion &quaternion, f32 scalar) |
| スカラ減算を取得 | |
| static GX_FORCE_INLINE const GxQuaternion & | getMulScalar (GxQuaternion &dst, const GxQuaternion &quaternion, f32 scalar) |
| スカラ乗算を取得 | |
| static GX_FORCE_INLINE const GxQuaternion & | getDivScalar (GxQuaternion &dst, const GxQuaternion &quaternion, f32 scalar) |
| スカラ除算を取得 | |
| static GX_FORCE_INLINE const GxQuaternion & | getAddQuaternion (GxQuaternion &dst, const GxQuaternion &quaternion0, const GxQuaternion &quaternion1) |
| クォータニオン加算を取得 | |
| static GX_FORCE_INLINE const GxQuaternion & | getSubQuaternion (GxQuaternion &dst, const GxQuaternion &quaternion0, const GxQuaternion &quaternion1) |
| クォータニオン減算を取得 | |
| static GX_FORCE_INLINE const GxQuaternion & | getMulQuaternion (GxQuaternion &dst, const GxQuaternion &quaternion0, const GxQuaternion &quaternion1) |
| クォータニオン乗算を取得 | |
| static GX_FORCE_INLINE const GxQuaternion & | getNormalize (GxQuaternion &dst, const GxQuaternion &quaternion) |
| 正規化クォータニオンを取得 | |
| static GX_FORCE_INLINE const GxQuaternion & | getNormalizeEx (GxQuaternion &dst, const GxQuaternion &quaternion) |
| 正規化クォータニオンを取得(長さ0に対応) | |
| static GX_FORCE_INLINE const GxQuaternion & | getConjugate (GxQuaternion &dst, const GxQuaternion &quaternion) |
| 共役クォータニオンを取得 | |
| static GX_FORCE_INLINE const GxQuaternion & | getInverse (GxQuaternion &dst, const GxQuaternion &quaternion) |
| 逆クォータニオンを取得 | |
| static GX_FORCE_INLINE const GxQuaternion & | getMulRotateX (GxQuaternion &dst, const GxQuaternion &quaternion, f32 radian) |
| X軸回転乗算を取得 | |
| static GX_FORCE_INLINE const GxQuaternion & | getMulRotateY (GxQuaternion &dst, const GxQuaternion &quaternion, f32 radian) |
| Y軸回転乗算を取得 | |
| static GX_FORCE_INLINE const GxQuaternion & | getMulRotateZ (GxQuaternion &dst, const GxQuaternion &quaternion, f32 radian) |
| Z軸回転乗算を取得 | |
| static GX_FORCE_INLINE const GxQuaternion & | getMulRotateXYZ (GxQuaternion &dst, const GxQuaternion &quaternion, f32 radianX, f32 radianY, f32 radianZ) |
| XYZ軸回転乗算を取得 | |
| static GX_FORCE_INLINE const GxQuaternion & | getMulRotateXZY (GxQuaternion &dst, const GxQuaternion &quaternion, f32 radianX, f32 radianY, f32 radianZ) |
| XZY軸回転乗算を取得 | |
| static GX_FORCE_INLINE const GxQuaternion & | getMulRotateYXZ (GxQuaternion &dst, const GxQuaternion &quaternion, f32 radianX, f32 radianY, f32 radianZ) |
| YXZ軸回転乗算を取得 | |
| static GX_FORCE_INLINE const GxQuaternion & | getMulRotateYZX (GxQuaternion &dst, const GxQuaternion &quaternion, f32 radianX, f32 radianY, f32 radianZ) |
| YZX軸回転乗算を取得 | |
| static GX_FORCE_INLINE const GxQuaternion & | getMulRotateZXY (GxQuaternion &dst, const GxQuaternion &quaternion, f32 radianX, f32 radianY, f32 radianZ) |
| ZXY軸回転乗算を取得 | |
| static GX_FORCE_INLINE const GxQuaternion & | getMulRotateZYX (GxQuaternion &dst, const GxQuaternion &quaternion, f32 radianX, f32 radianY, f32 radianZ) |
| ZYX軸回転乗算を取得 | |
| static GX_FORCE_INLINE f32 | getDot (const GxQuaternion &quaternion0, const GxQuaternion &quaternion1) |
| 内積を取得 | |
| static GX_FORCE_INLINE const GxQuaternion & | getLerp (GxQuaternion &dst, const GxQuaternion &quaternion0, const GxQuaternion &quaternion1, f32 t) |
| 線形補間を取得 | |
| static GX_FORCE_INLINE const GxQuaternion & | getSphericalLerp (GxQuaternion &dst, const GxQuaternion &quaternion0, const GxQuaternion &quaternion1, f32 t) |
| 球面線形補間を取得 | |
Additional Inherited Members | |
 Static Public Member Functions inherited from GxStructBase Static Public Member Functions inherited from GxStructBase | |
| static GxRtti & | __getStaticRtti (void) |
クォータニオン
| GX_FORCE_INLINE GxQuaternion::GxQuaternion | ( | f32 | x, |
| f32 | y, | ||
| f32 | z, | ||
| f32 | w ) |
コンストラクタ
| x | [in] X値 |
| y | [in] Y値 |
| z | [in] Z値 |
| w | [in] W値 |
| GX_FORCE_INLINE GxQuaternion::GxQuaternion | ( | const GxFloat4 & | float4 | ) |
コンストラクタ
| float4 | [in] 値 |
| GX_FORCE_INLINE GxQuaternion::GxQuaternion | ( | const f32 * | pFloatArray | ) |
コンストラクタ
| pFloatArray | [in] 値配列 |
| GX_FORCE_INLINE GxQuaternion::GxQuaternion | ( | const GxVector3 & | vector, |
| f32 | w ) |
コンストラクタ
| vector | [in] XYZ値 |
| w | [in] W値 |
| GX_FORCE_INLINE GxQuaternion::GxQuaternion | ( | const GxVector4 & | vector | ) |
コンストラクタ
| vector | [in] XYZW値 |
| GX_FORCE_INLINE GxQuaternion::GxQuaternion | ( | const GxMatrixAffine & | matrix | ) |
コンストラクタ
| matrix | [in] マトリクス |

| GX_FORCE_INLINE GxQuaternion::GxQuaternion | ( | const GxMatrix44 & | matrix | ) |
コンストラクタ
| matrix | [in] マトリクス |

| GX_FORCE_INLINE GxQuaternion::GxQuaternion | ( | const GxQuaternion & | quaternion | ) |
コピーコンストラクタ
| quaternion | [in] クウォータニオン |
| GX_FORCE_INLINE const GxQuaternion & GxQuaternion::addQuaternion | ( | const GxQuaternion & | quaternion | ) |
クォータニオン加算
| quaternion | [in] クォータニオン |

| GX_FORCE_INLINE const GxQuaternion & GxQuaternion::addScalar | ( | f32 | scalar | ) |
スカラ加算
| scalar | [in] スカラ |

| GX_FORCE_INLINE const GxQuaternion & GxQuaternion::conjugate | ( | void | ) |
共役クォータニオンを計算する
| なし |
| GX_FORCE_INLINE const GxQuaternion & GxQuaternion::divScalar | ( | f32 | scalar | ) |
スカラ除算
| scalar | [in] スカラ |

|
static |
クォータニオン加算を取得
| dst | [out] 出力先 |
| quaternion0 | [in] クォータニオン |
| quaternion1 | [in] クォータニオン |
|
static |
スカラ加算を取得
| dst | [out] 出力先 |
| quaternion | [in] クォータニオン |
| scalar | [in] スカラ |
|
static |
共役クォータニオンを取得
| dst | [out] 出力先 |
| quaternion | [in] クォータニオン |
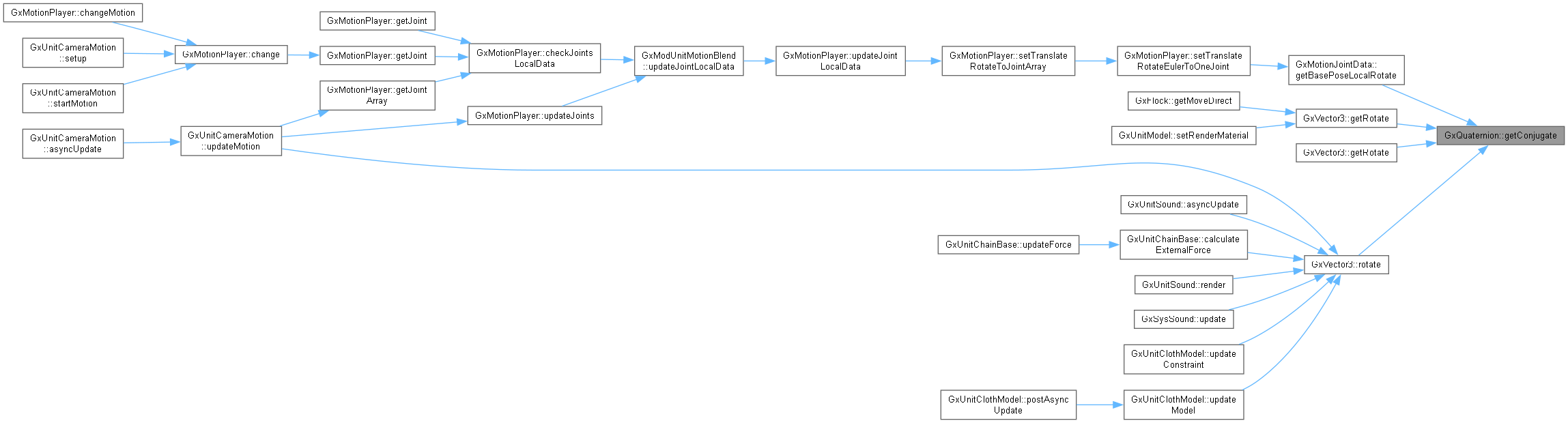
| GX_FORCE_INLINE GxQuaternion GxQuaternion::getConjugate | ( | void | ) | const |
共役クォータニオンを取得

|
static |
スカラ除算を取得
| dst | [out] 出力先 |
| quaternion | [in] クォータニオン |
| scalar | [in] スカラ |
|
static |
逆クォータニオンを取得
| dst | [out] 出力先 |
| quaternion | [in] クォータニオン |

| GX_FORCE_INLINE GxQuaternion GxQuaternion::getInverse | ( | void | ) | const |
逆クォータニオンを取得
| GX_FORCE_INLINE f32 GxQuaternion::getLength | ( | void | ) | const |
長さを取得

| GX_FORCE_INLINE f32 GxQuaternion::getLengthSquare | ( | void | ) | const |
長さの2乗を取得
|
static |
クォータニオン乗算を取得
| dst | [out] 出力先 |
| quaternion0 | [in] クォータニオン |
| quaternion1 | [in] クォータニオン |
|
static |
X軸回転乗算を取得
| dst | [out] 出力先 |
| quaternion | [in] クォータニオン |
| radian | [in] 回転角 |

|
static |
XYZ軸回転乗算を取得
| dst | [out] 出力先 |
| quaternion | [in] クォータニオン |
| radianX | [in] X軸回転角 |
| radianY | [in] Y軸回転角 |
| radianZ | [in] Z軸回転角 |

|
static |
XZY軸回転乗算を取得
| dst | [out] 出力先 |
| quaternion | [in] クォータニオン |
| radianX | [in] X軸回転角 |
| radianY | [in] Y軸回転角 |
| radianZ | [in] Z軸回転角 |

|
static |
Y軸回転乗算を取得
| dst | [out] 出力先 |
| quaternion | [in] クォータニオン |
| radian | [in] 回転角 |

|
static |
YXZ軸回転乗算を取得
| dst | [out] 出力先 |
| quaternion | [in] クォータニオン |
| radianX | [in] X軸回転角 |
| radianY | [in] Y軸回転角 |
| radianZ | [in] Z軸回転角 |

|
static |
YZX軸回転乗算を取得
| dst | [out] 出力先 |
| quaternion | [in] クォータニオン |
| radianX | [in] X軸回転角 |
| radianY | [in] Y軸回転角 |
| radianZ | [in] Z軸回転角 |

|
static |
Z軸回転乗算を取得
| dst | [out] 出力先 |
| quaternion | [in] クォータニオン |
| radian | [in] 回転角 |

|
static |
ZXY軸回転乗算を取得
| dst | [out] 出力先 |
| quaternion | [in] クォータニオン |
| radianX | [in] X軸回転角 |
| radianY | [in] Y軸回転角 |
| radianZ | [in] Z軸回転角 |

|
static |
ZYX軸回転乗算を取得
| dst | [out] 出力先 |
| quaternion | [in] クォータニオン |
| radianX | [in] X軸回転角 |
| radianY | [in] Y軸回転角 |
| radianZ | [in] Z軸回転角 |

|
static |
スカラ乗算を取得
| dst | [out] 出力先 |
| quaternion | [in] クォータニオン |
| scalar | [in] スカラ |
|
static |
正規化クォータニオンを取得
| dst | [out] 出力先 |
| quaternion | [in] クォータニオン |

| GX_FORCE_INLINE GxQuaternion GxQuaternion::getNormalize | ( | void | ) | const |
正規化クォータニオンを取得

|
static |
正規化クォータニオンを取得(長さ0に対応)
| dst | [out] 出力先 |
| quaternion | [in] クォータニオン |

| GX_FORCE_INLINE GxQuaternion GxQuaternion::getNormalizeEx | ( | void | ) | const |
正規化クォータニオンを取得(長さ0に対応)

|
static |
クォータニオン減算を取得
| dst | [out] 出力先 |
| quaternion0 | [in] クォータニオン |
| quaternion1 | [in] クォータニオン |
|
static |
スカラ減算を取得
| dst | [out] 出力先 |
| quaternion | [in] クォータニオン |
| scalar | [in] スカラ |
| GX_FORCE_INLINE const GxQuaternion & GxQuaternion::inverse | ( | void | ) |
逆クォータニオンを計算する

| GX_FORCE_INLINE const GxQuaternion & GxQuaternion::mulQuaternion | ( | const GxQuaternion & | quaternion | ) |
クォータニオン乗算
| quaternion | [in] クォータニオン |
| GX_FORCE_INLINE const GxQuaternion & GxQuaternion::mulRotateX | ( | f32 | radian | ) |
X軸回転乗算
| radian | [in] 回転値 |


| GX_FORCE_INLINE const GxQuaternion & GxQuaternion::mulRotateXYZ | ( | f32 | radianX, |
| f32 | radianY, | ||
| f32 | radianZ ) |
XYZ軸回転乗算
| radianX | [in] 回転値X |
| radianY | [in] 回転値Y |
| radianZ | [in] 回転値Z |


| GX_FORCE_INLINE const GxQuaternion & GxQuaternion::mulRotateXZY | ( | f32 | radianX, |
| f32 | radianY, | ||
| f32 | radianZ ) |
XZY軸回転乗算
| radianX | [in] 回転値X |
| radianY | [in] 回転値Y |
| radianZ | [in] 回転値Z |


| GX_FORCE_INLINE const GxQuaternion & GxQuaternion::mulRotateY | ( | f32 | radian | ) |
Y軸回転乗算
| radian | [in] 回転値 |


| GX_FORCE_INLINE const GxQuaternion & GxQuaternion::mulRotateYXZ | ( | f32 | radianX, |
| f32 | radianY, | ||
| f32 | radianZ ) |
YXZ軸回転乗算
| radianX | [in] 回転値X |
| radianY | [in] 回転値Y |
| radianZ | [in] 回転値Z |


| GX_FORCE_INLINE const GxQuaternion & GxQuaternion::mulRotateYZX | ( | f32 | radianX, |
| f32 | radianY, | ||
| f32 | radianZ ) |
YZX軸回転乗算
| radianX | [in] 回転値X |
| radianY | [in] 回転値Y |
| radianZ | [in] 回転値Z |


| GX_FORCE_INLINE const GxQuaternion & GxQuaternion::mulRotateZ | ( | f32 | radian | ) |
Z軸回転乗算
| radian | [in] 回転値 |


| GX_FORCE_INLINE const GxQuaternion & GxQuaternion::mulRotateZXY | ( | f32 | radianX, |
| f32 | radianY, | ||
| f32 | radianZ ) |
ZXY軸回転乗算
| radianX | [in] 回転値X |
| radianY | [in] 回転値Y |
| radianZ | [in] 回転値Z |


| GX_FORCE_INLINE const GxQuaternion & GxQuaternion::mulRotateZYX | ( | f32 | radianX, |
| f32 | radianY, | ||
| f32 | radianZ ) |
ZYX軸回転乗算
| radianX | [in] 回転値X |
| radianY | [in] 回転値Y |
| radianZ | [in] 回転値Z |


| GX_FORCE_INLINE const GxQuaternion & GxQuaternion::mulScalar | ( | f32 | scalar | ) |
スカラ乗算
| scalar | [in] スカラ |

| GX_FORCE_INLINE const GxQuaternion & GxQuaternion::normalize | ( | void | ) |
正規化する
| なし |


| GX_FORCE_INLINE const GxQuaternion & GxQuaternion::normalizeEx | ( | void | ) |
正規化する(長さ0に対応)
| なし |

| GX_FORCE_INLINE GxQuaternion & GxQuaternion::operator*= | ( | const GxQuaternion & | quaternion | ) |
クォータニオン乗算代入
| quaternion | [in] クウォータニオン |

| GX_FORCE_INLINE GxQuaternion & GxQuaternion::operator*= | ( | f32 | scalar | ) |
スカラ乗算代入
| scalar | [in] スカラ |

| GX_FORCE_INLINE GxQuaternion & GxQuaternion::operator+= | ( | const GxQuaternion & | quaternion | ) |
クォータニオン加算代入
| quaternion | [in] クウォータニオン |

| GX_FORCE_INLINE GxQuaternion & GxQuaternion::operator+= | ( | f32 | scalar | ) |
スカラ加算代入
| scalar | [in] スカラ |

| GX_FORCE_INLINE GxQuaternion & GxQuaternion::operator-= | ( | const GxQuaternion & | quaternion | ) |
クォータニオン減算代入
| quaternion | [in] クウォータニオン |

| GX_FORCE_INLINE GxQuaternion & GxQuaternion::operator-= | ( | f32 | scalar | ) |
スカラ減算代入
| scalar | [in] スカラ |

| GX_FORCE_INLINE GxQuaternion & GxQuaternion::operator/= | ( | f32 | scalar | ) |
スカラ除算代入
| scalar | [in] スカラ |

| GX_FORCE_INLINE GxQuaternion & GxQuaternion::operator= | ( | const GxQuaternion & | quaternion | ) |
代入
| quaternion | [in] クウォータニオン |
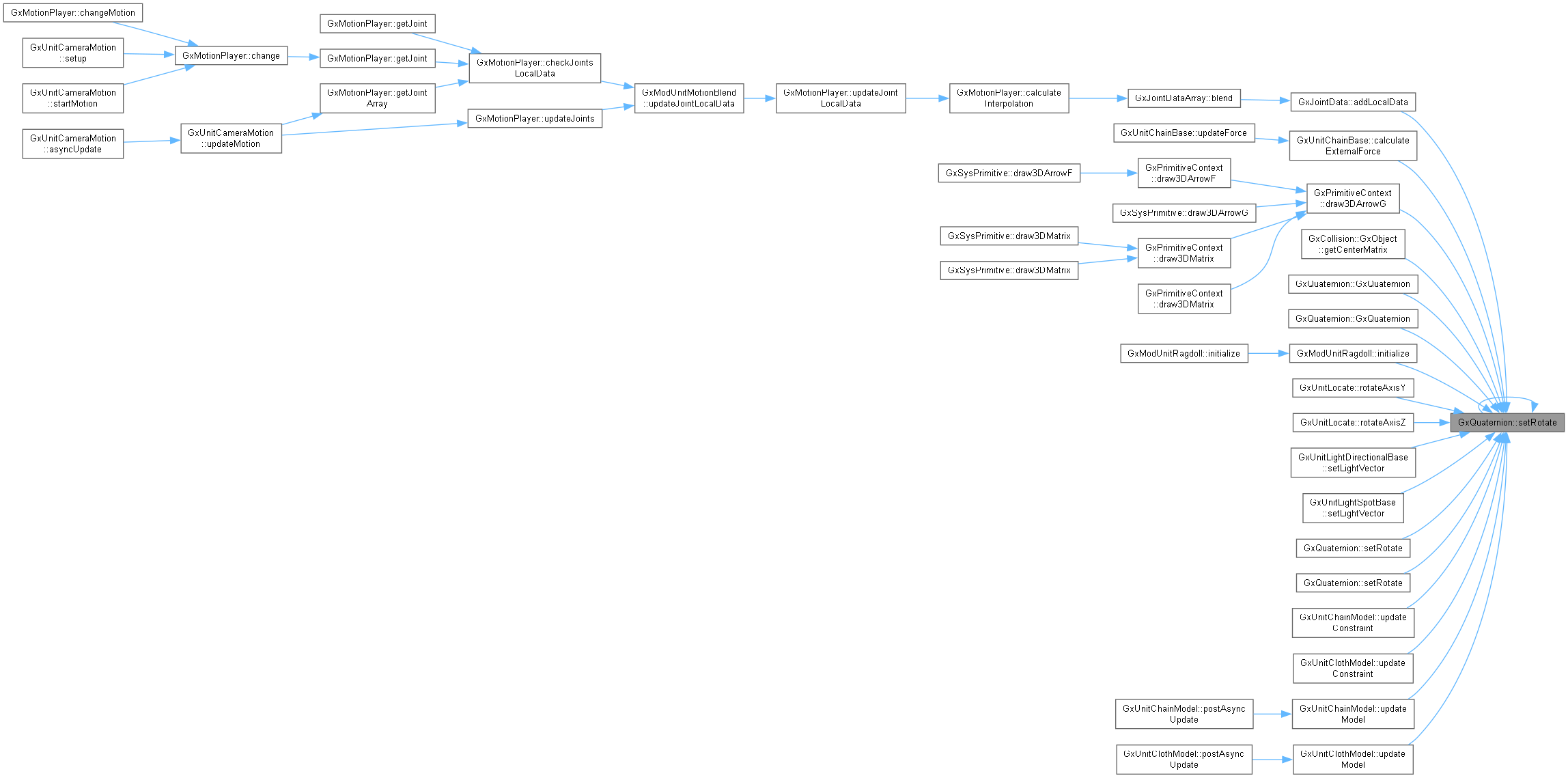
| void GxQuaternion::setRotate | ( | const GxMatrix44 & | matrix | ) |
回転を設定(マトリクス指定)
| matrix | [in] マトリクス |
| void GxQuaternion::setRotate | ( | const GxMatrixAffine & | matrix | ) |
回転を設定(マトリクス指定)
| matrix | [in] マトリクス |
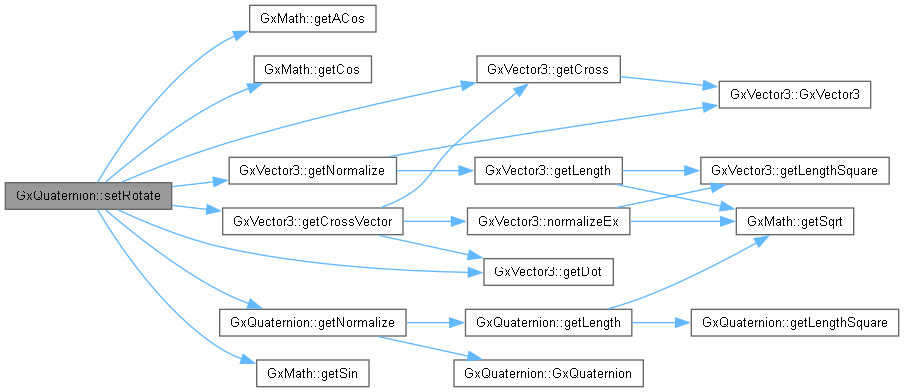
| void GxQuaternion::setRotate | ( | const GxVector3 & | axis, |
| const GxVector3 & | startVector, | ||
| const GxVector3 & | targetVector, | ||
| f32 | radian ) |
回転を設定(軸、開始ベクトル、目標ベクトル、角度指定)
| axis | [in] 軸ベクトル |
| startVector | [in] 開始ベクトル |
| targetVector | [in] 目標ベクトル |
| radian | [in] 角度 |
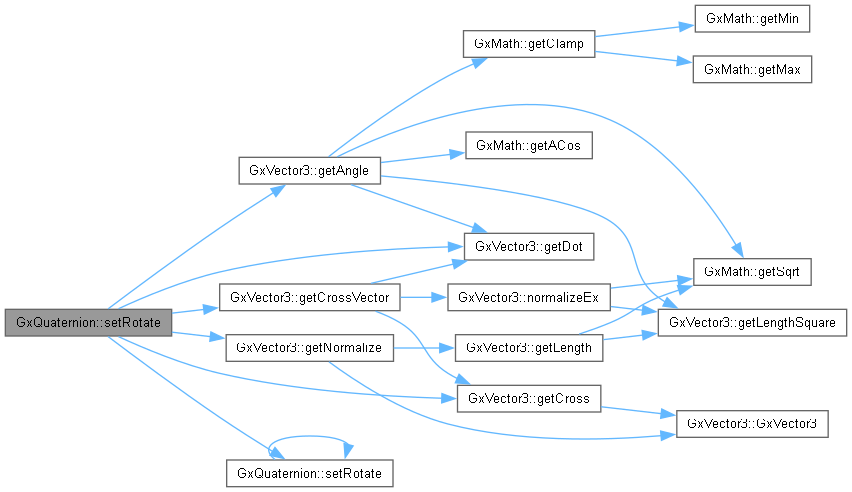
| void GxQuaternion::setRotate | ( | const GxVector3 & | axis, |
| f32 | radian ) |
回転を設定(軸、角度指定)
| axis | [in] 軸ベクトル |
| radian | [in] 角度 |

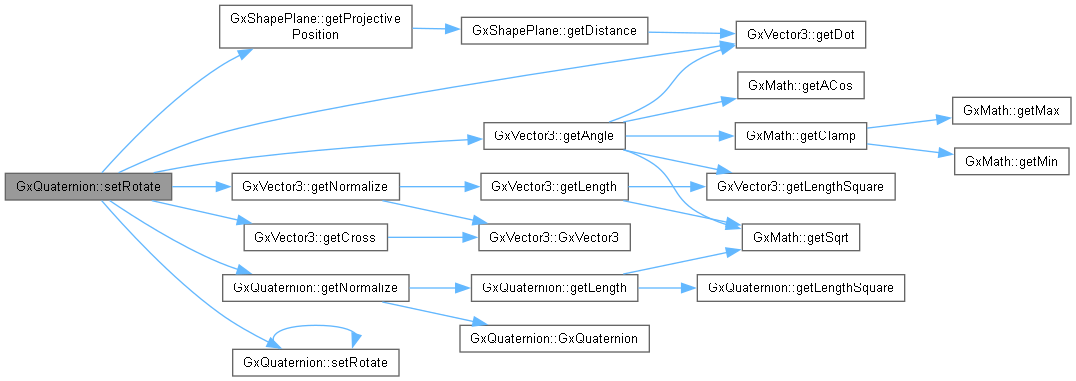
回転を設定(開始ベクトル、目標ベクトル指定)
| startVector | [in] 開始ベクトル |
| targetVector | [in] 目標ベクトル |
| void GxQuaternion::setRotate | ( | const GxVector3 & | startVector, |
| const GxVector3 & | targetVector, | ||
| f32 | radian ) |
回転を設定(開始ベクトル、目標ベクトル、角度指定)
| startVector | [in] 開始ベクトル |
| targetVector | [in] 目標ベクトル |
| radian | [in] 角度 |
| GX_FORCE_INLINE void GxQuaternion::setRotate | ( | const GxVector3 & | vector | ) |
回転を設定(ベクトル指定)
| vector | [in] 回転値 |

| void GxQuaternion::setRotate | ( | f32 | yaw, |
| f32 | pitch, | ||
| f32 | roll ) |
回転を設定(ヨー角、ピッチ角、ロール角指定)
| yaw | [in] ヨー角 |
| pitch | [in] ピッチ角 |
| roll | [in] ロール角 |
| void GxQuaternion::setRotateEx | ( | const GxVector3 & | axis, |
| const GxVector3 & | startVector, | ||
| const GxVector3 & | targetVector, | ||
| f32 | radian ) |
回転を設定(軸、開始ベクトル、目標ベクトル、角度指定、長さ0ベクトルに対応)
| axis | [in] 軸ベクトル |
| startVector | [in] 開始ベクトル |
| targetVector | [in] 目標ベクトル |
| radian | [in] 角度 |
| void GxQuaternion::setRotateEx | ( | const GxVector3 & | axis, |
| f32 | radian ) |
回転を設定(軸、角度指定、長さ0ベクトルに対応)
| axis | [in] 軸ベクトル |
| radian | [in] 角度 |
回転を設定(開始ベクトル、目標ベクトル指定、長さ0ベクトルに対応)
| startVector | [in] 開始ベクトル |
| targetVector | [in] 目標ベクトル |
| void GxQuaternion::setRotateEx | ( | const GxVector3 & | startVector, |
| const GxVector3 & | targetVector, | ||
| f32 | radian ) |
回転を設定(開始ベクトル、目標ベクトル、角度指定、長さ0ベクトルに対応)
| startVector | [in] 開始ベクトル |
| targetVector | [in] 目標ベクトル |
| radian | [in] 角度 |
| GX_FORCE_INLINE void GxQuaternion::setRotateX | ( | f32 | radian | ) |
X軸回転を設定
| radian | [in] 回転値 |

| GX_FORCE_INLINE void GxQuaternion::setRotateY | ( | f32 | radian | ) |
Y軸回転を設定
| radian | [in] 回転値 |

| GX_FORCE_INLINE void GxQuaternion::setRotateZ | ( | f32 | radian | ) |
Z軸回転を設定
| radian | [in] 回転値 |

| GX_FORCE_INLINE const GxQuaternion & GxQuaternion::subQuaternion | ( | const GxQuaternion & | quaternion | ) |
クォータニオン減算
| quaternion | [in] クォータニオン |

| GX_FORCE_INLINE const GxQuaternion & GxQuaternion::subScalar | ( | f32 | scalar | ) |
スカラ減算
| scalar | [in] スカラ |

|
friend |
不一致
| quaternion0 | [in] クウォータニオン |
| quaternion1 | [in] クウォータニオン |
|
friend |
スカラ乗算
| quaternion | [in] クウォータニオン |
| scalar | [in] スカラ |
|
friend |
クォータニオン乗算
| quaternion0 | [in] クウォータニオン |
| quaternion1 | [in] クウォータニオン |
|
friend |
スカラ乗算
| quaternion | [in] クウォータニオン |
| scalar | [in] スカラ |
|
friend |
スカラ加算
| quaternion | [in] クウォータニオン |
| scalar | [in] スカラ |
|
friend |
クォータニオン加算
| quaternion0 | [in] クウォータニオン |
| quaternion1 | [in] クウォータニオン |
|
friend |
スカラ減算
| quaternion | [in] クウォータニオン |
| scalar | [in] スカラ |
|
friend |
クォータニオン減算
| quaternion0 | [in] クウォータニオン |
| quaternion1 | [in] クウォータニオン |
|
friend |
スカラ除算
| quaternion | [in] クウォータニオン |
| scalar | [in] スカラ |
|
friend |
一致
| quaternion0 | [in] クウォータニオン |
| quaternion1 | [in] クウォータニオン |