|
OROCHI
|

|
|
OROCHI
|
|
4×4行列(行優先) More...
#include <GxMatrix.h>
Public Member Functions | |
初期化 | |
| GxMatrix44 (void) | |
| デフォルトコンストラクタ(要素は初期化されない) | |
| GX_INLINE | GxMatrix44 (INIT initType) |
| コンストラクタ(引数のタイプで要素を初期化する) | |
| GX_INLINE | GxMatrix44 (const GxQuaternion &quaternion, const GxVector3 &position) |
| コンストラクタ | |
| GX_INLINE | GxMatrix44 (const GxQuaternion &quaternion) |
| コンストラクタ | |
| GX_INLINE | GxMatrix44 (const GxVector3 &position) |
| コンストラクタ | |
| GX_INLINE | GxMatrix44 (f32 m00, f32 m01, f32 m02, f32 m03, f32 m10, f32 m11, f32 m12, f32 m13, f32 m20, f32 m21, f32 m22, f32 m23, f32 m30, f32 m31, f32 m32, f32 m33) |
| コンストラクタ | |
| GX_INLINE | GxMatrix44 (const GxMatrixAffine &matrix) |
| コンストラクタ | |
| GX_INLINE | GxMatrix44 (const GxMatrix44 &matrix) |
| コピーコンストラクタ | |
| GX_FORCE_INLINE void | initialize (const GxQuaternion &quaternion, const GxVector3 &position) |
| 初期化 | |
操作 | |
| GX_FORCE_INLINE const GxMatrix44 & | mulScalar (f32 scalar) |
| スカラ乗算 | |
| GX_FORCE_INLINE const GxMatrix44 & | divScalar (f32 scalar) |
| スカラ除算 | |
| GX_FORCE_INLINE const GxMatrix44 & | addMatrix (const GxMatrix44 &matrix) |
| 行列加算 | |
| GX_FORCE_INLINE const GxMatrix44 & | mulMatrix (const GxMatrix44 &matrix) |
| 行列乗算 | |
| GX_FORCE_INLINE const GxMatrix44 & | mulRotateX (f32 radian) |
| X軸回転乗算 | |
| GX_FORCE_INLINE const GxMatrix44 & | mulRotateY (f32 radian) |
| Y軸回転乗算 | |
| GX_FORCE_INLINE const GxMatrix44 & | mulRotateZ (f32 radian) |
| Z軸回転乗算 | |
| GX_FORCE_INLINE const GxMatrix44 & | mulQuaternionFront (const GxQuaternion &quaternion) |
| クォータニオンによる回転乗算(前から乗算) | |
| GX_FORCE_INLINE const GxMatrix44 & | mulQuaternionBack (const GxQuaternion &quaternion) |
| クォータニオンによる回転乗算(後ろから乗算) | |
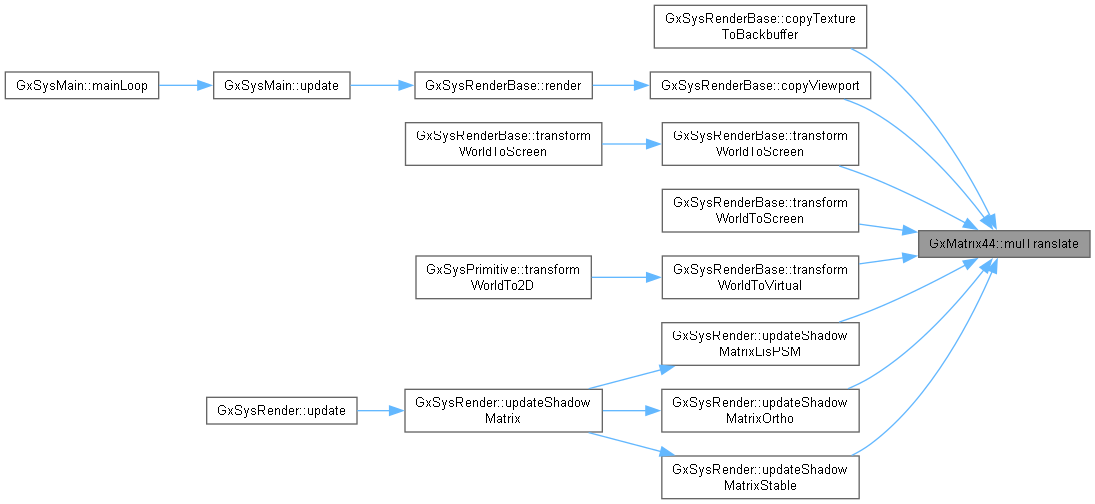
| GX_FORCE_INLINE const GxMatrix44 & | mulTranslate (const GxVector3 &vector) |
| 平行移動乗算 | |
| GX_FORCE_INLINE const GxMatrix44 & | mulTranslate (f32 x, f32 y, f32 z) |
| 平行移動乗算 | |
| GX_FORCE_INLINE const GxMatrix44 & | mulScale (const GxVector3 &vector) |
| スケール乗算 | |
| GX_FORCE_INLINE const GxMatrix44 & | mulScale (f32 x, f32 y, f32 z) |
| スケール乗算 | |
| GX_FORCE_INLINE const GxMatrix44 & | inverse (void) |
| 逆行列を計算する | |
| GX_FORCE_INLINE const GxMatrix44 & | transpose (void) |
| 転置する | |
| GX_FORCE_INLINE void | setZero (void) |
| 0を設定 | |
Public Attributes | |
メンバ変数 | |
| f32 | _m [4][4] |
| 値 | |
定義 | |
| static const GxMatrix44 | ZERO |
| 0行列 | |
| static const GxMatrix44 | IDENTITY |
| 単位行列 | |
| struct | GxMatrixAffine |
| struct | GxMatrix44Gpu |
演算子 | |
| GX_FORCE_INLINE const GxMatrix44 | operator* (const GxMatrix44 &matrix, f32 scalar) |
| スカラ乗算 | |
| GX_FORCE_INLINE const GxMatrix44 | operator/ (const GxMatrix44 &matrix, f32 scalar) |
| スカラ除算 | |
| GX_FORCE_INLINE const GxMatrix44 | operator+ (const GxMatrix44 &matrix0, const GxMatrix44 &matrix1) |
| 行列加算 | |
| GX_FORCE_INLINE const GxMatrix44 | operator* (const GxMatrix44 &matrix0, const GxMatrix44 &matrix1) |
| 行列乗算 | |
| GX_FORCE_INLINE GxMatrix44 & | operator= (const GxMatrix44 &matrix) |
| 代入 | |
| GX_FORCE_INLINE GxMatrix44 & | operator*= (f32 scalar) |
| スカラ乗算代入 | |
| GX_FORCE_INLINE GxMatrix44 & | operator/= (f32 scalar) |
| スカラ除算代入 | |
| GX_FORCE_INLINE GxMatrix44 & | operator+= (const GxMatrix44 &matrix) |
| 行列加算代入 | |
| GX_FORCE_INLINE GxMatrix44 & | operator*= (const GxMatrix44 &matrix) |
| 行列乗算代入 | |
| GX_FORCE_INLINE b32 | operator== (const GxMatrix44 &matrix) |
| 一致 | |
| GX_FORCE_INLINE b32 | operator!= (const GxMatrix44 &matrix) |
| 不一致 | |
アクセサ | |
| GX_FORCE_INLINE void | setIdentity (void) |
| 単位行列に設定 | |
| GX_FORCE_INLINE void | setRotateX (f32 sinValue, f32 cosValue) |
| 回転行列を設定(X軸回転) | |
| GX_FORCE_INLINE void | setRotateX (f32 radian) |
| 回転行列を設定(X軸回転) | |
| GX_FORCE_INLINE void | setRotateY (f32 sinValue, f32 cosValue) |
| 回転行列を設定(Y軸回転) | |
| GX_FORCE_INLINE void | setRotateY (f32 radian) |
| 回転行列を設定(Y軸回転) | |
| GX_FORCE_INLINE void | setRotateZ (f32 sinValue, f32 cosValue) |
| 回転行列を設定(Z軸回転) | |
| GX_FORCE_INLINE void | setRotateZ (f32 radian) |
| 回転行列を設定(Z軸回転) | |
| GX_FORCE_INLINE GxVector3 | getRotateXYZ (void) const |
| XYZ軸回転角を取得 | |
| GX_FORCE_INLINE void | setRotateXYZ (f32 x, f32 y, f32 z) |
| 回転行列を設定(XYZ軸回転) | |
| GX_FORCE_INLINE GxVector3 | getRotateXZY (void) const |
| XZY軸回転角を取得 | |
| GX_FORCE_INLINE void | setRotateXZY (f32 x, f32 y, f32 z) |
| 回転行列を設定(XZY軸回転) | |
| GX_FORCE_INLINE GxVector3 | getRotateYXZ (void) const |
| YXZ軸回転角を取得 | |
| GX_FORCE_INLINE void | setRotateYXZ (f32 x, f32 y, f32 z) |
| 回転行列を設定(YXZ軸回転) | |
| GX_FORCE_INLINE GxVector3 | getRotateYZX (void) const |
| YZX軸回転角を取得 | |
| GX_FORCE_INLINE void | setRotateYZX (f32 x, f32 y, f32 z) |
| 回転行列を設定(YZX軸回転) | |
| GX_FORCE_INLINE GxVector3 | getRotateZXY (void) const |
| ZXY軸回転角を取得 | |
| GX_FORCE_INLINE void | setRotateZXY (f32 x, f32 y, f32 z) |
| 回転行列を設定(ZXY軸回転) | |
| GX_FORCE_INLINE GxVector3 | getRotateZYX (void) const |
| ZYX軸回転角を取得 | |
| GX_FORCE_INLINE void | setRotateZYX (f32 x, f32 y, f32 z) |
| 回転行列を設定(ZYX軸回転) | |
| GX_FORCE_INLINE void | setTranslate (const GxVector3 &vector) |
| 平行移動行列を設定 | |
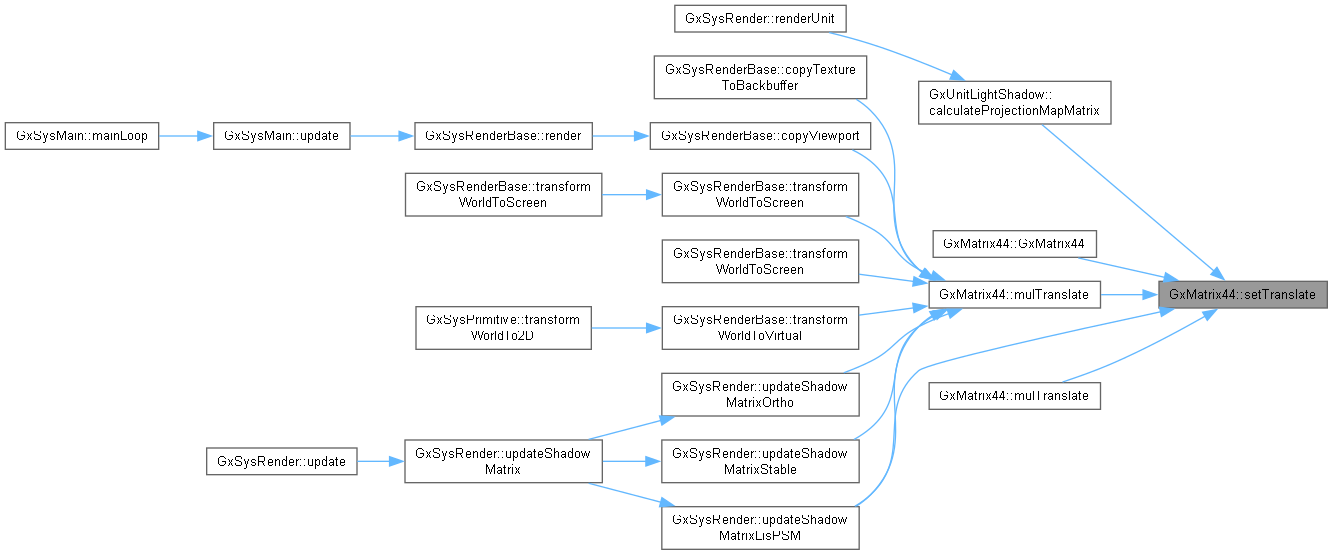
| GX_FORCE_INLINE void | setTranslate (f32 x, f32 y, f32 z) |
| 平行移動行列を設定 | |
| GX_FORCE_INLINE const GxVector3 & | getPosition (void) const |
| 平行移動量を取得 | |
| GX_FORCE_INLINE void | setPosition (const GxVector3 &position) |
| 平行移動量のみを設定 | |
| GX_FORCE_INLINE void | setPosition (f32 x, f32 y, f32 z) |
| 平行移動量のみを設定 | |
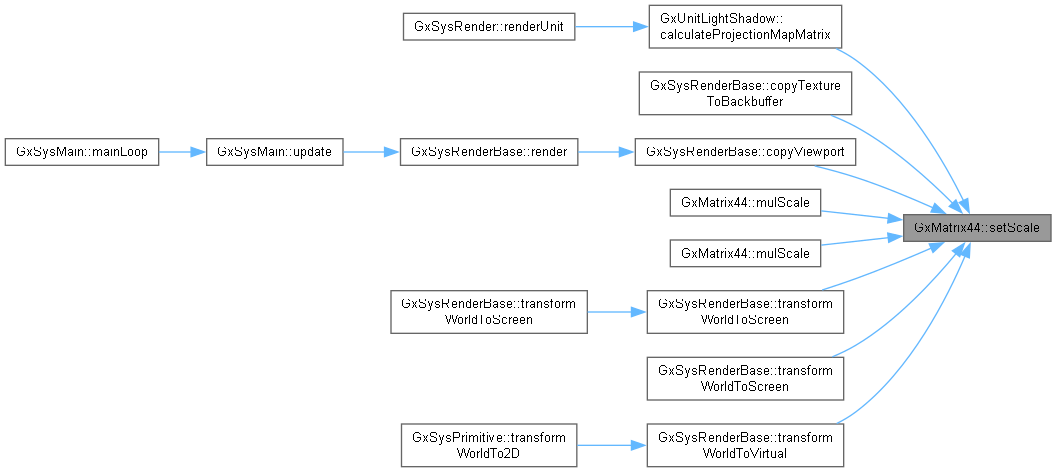
| GX_FORCE_INLINE void | setScale (const GxVector3 &vector) |
| スケール行列を設定 | |
| GX_FORCE_INLINE void | setScale (f32 x, f32 y, f32 z) |
| スケール行列を設定 | |
| GX_FORCE_INLINE void | setRotateAxis (const GxVector3 &vector, f32 radian) |
| 回転行列を設定 | |
| GX_FORCE_INLINE void | setRotate (const GxQuaternion &quaternion) |
| 回転行列を設定 | |
| GX_FORCE_INLINE const GxVector4 & | getRow (u32 row) const |
| 行を取得 | |
| GX_FORCE_INLINE void | setRow (u32 row, const GxVector4 &vector) |
| 行を設定 | |
| GX_FORCE_INLINE GxVector4 | getColumn (u32 column) const |
| 列を取得 | |
| GX_FORCE_INLINE void | setColumn (u32 column, const GxVector4 &vector) |
| 列を設定 | |
| GX_FORCE_INLINE f32 | getValue (u32 row, u32 column) const |
| 値を取得 | |
| GX_FORCE_INLINE void | setValue (u32 row, u32 column, f32 value) |
| 値を設定 | |
| GX_FORCE_INLINE f32 & | getReference (u32 row, u32 column) |
| 参照を取得 | |
| GX_FORCE_INLINE const f32 & | getReference (u32 row, u32 column) const |
| 参照を取得 | |
| void | setLookAtRH (const GxVector3 &eyePosition, const GxVector3 &atPosition, const GxVector3 &up) |
| 右手座標系・視点行列を設定 | |
| void | setLookAtLH (const GxVector3 &eyePosition, const GxVector3 &atPosition, const GxVector3 &up) |
| 左手座標系・視点行列を設定 | |
| void | setPerspectiveFovRH (f32 nearZ, f32 farZ, f32 fov, f32 aspect) |
| 右手座標系・射影変換行列を設定 | |
| void | setPerspectiveFovRH (f32 nearZ, f32 farZ, f32 fov, f32 aspect, const GxVector2 &pixelOffset, const GxSize &viewportSize) |
| 右手座標系・射影変換行列を設定(ピクセルオフセット指定) | |
| void | setPerspectiveFovLH (f32 nearZ, f32 farZ, f32 fov, f32 aspect) |
| 左手座標系・射影変換行列を設定 | |
| void | setFrustumRH (f32 left, f32 right, f32 top, f32 bottom, f32 nearZ, f32 farZ) |
| 右手座標系・射影変換行列を設定 | |
| void | setFrustumLH (f32 left, f32 right, f32 top, f32 bottom, f32 nearZ, f32 farZ) |
| 左手座標系・射影変換行列を設定 | |
| void | setOrthoRH (f32 left, f32 right, f32 top, f32 bottom, f32 nearZ, f32 farZ) |
| 右手座標系・正射影変換行列を設定 | |
| void | setOrthoRH (f32 left, f32 right, f32 top, f32 bottom, f32 nearZ, f32 farZ, const GxVector2 &pixelOffset, const GxSize &viewportSize) |
| 右手座標系・正射影変換行列を設定(ピクセルオフセット指定) | |
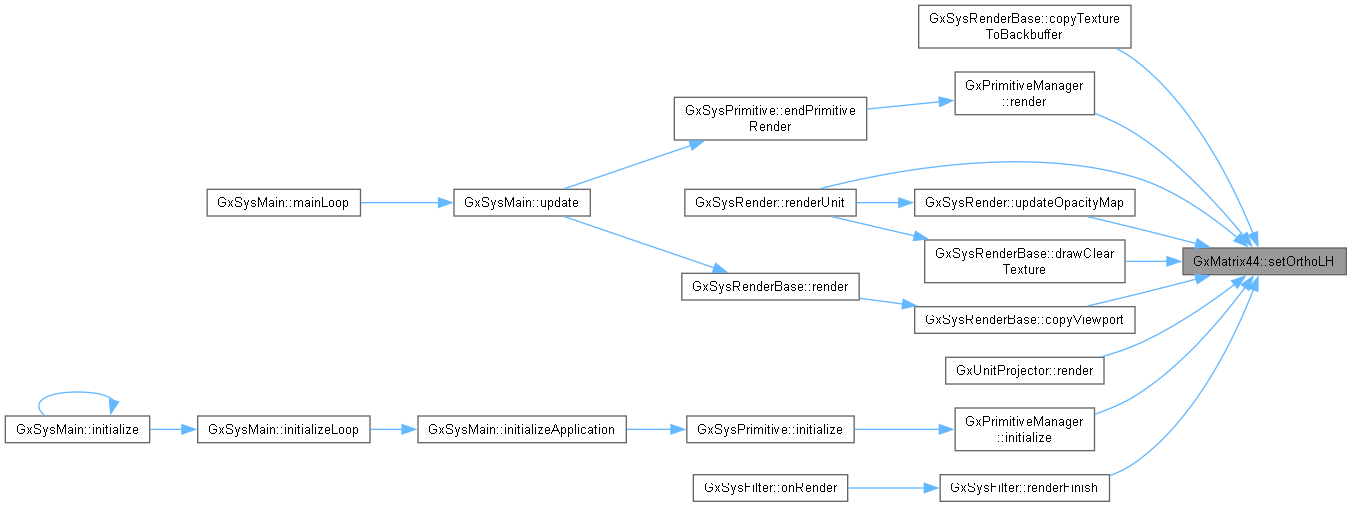
| void | setOrthoLH (f32 left, f32 right, f32 top, f32 bottom, f32 nearZ, f32 farZ) |
| 左手座標系・正射影変換行列を設定 | |
| void | setOrthoLH (f32 left, f32 right, f32 top, f32 bottom, f32 nearZ, f32 farZ, const GxVector2 &pixelOffset, const GxSize &viewportSize) |
| 左手座標系・正射影変換行列を設定(ピクセルオフセット指定) | |
| GX_FORCE_INLINE f32 | getDeterminant (void) const |
| 行列式の値を取得 | |
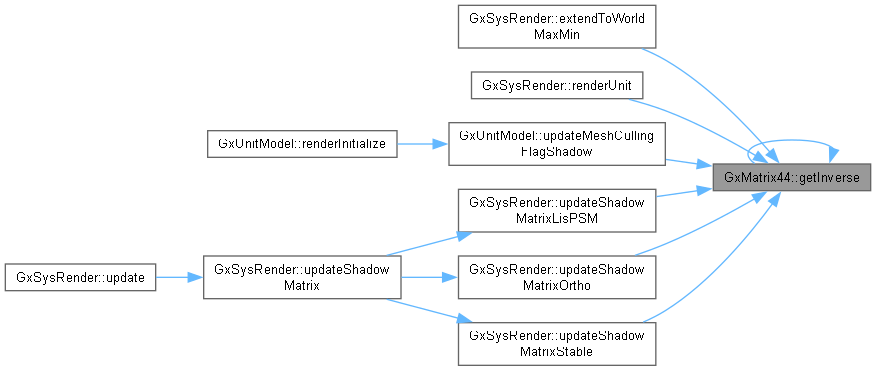
| GX_FORCE_INLINE GxMatrix44 | getInverse (void) const |
| 逆行列を取得 | |
| GX_FORCE_INLINE GxMatrix44 | getTranspose (void) const |
| 転置行列を取得 | |
| GX_FORCE_INLINE GxMatrix44 | getNormalizeAxes (void) const |
| 位置以外の各軸を正規化したものを取得 | |
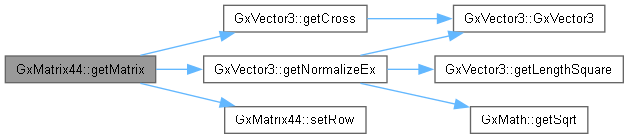
| static GxMatrix44 | getMatrix (AXIS axis0, const GxVector3 &vector0, AXIS axis1, const GxVector3 &vector1) |
| 2つの軸とベクトルから行列を取得 | |
| static GX_FORCE_INLINE const GxMatrix44 & | getMulScalar (GxMatrix44 &dst, const GxMatrix44 &matrix, f32 scalar) |
| スカラ乗算を取得 | |
| static GX_FORCE_INLINE const GxMatrix44 & | getDivScalar (GxMatrix44 &dst, const GxMatrix44 &matrix, f32 scalar) |
| スカラ除算を取得 | |
| static GX_FORCE_INLINE const GxMatrix44 & | getAddMatrix (GxMatrix44 &dst, const GxMatrix44 &matrix0, const GxMatrix44 &matrix1) |
| 行列加算を取得 | |
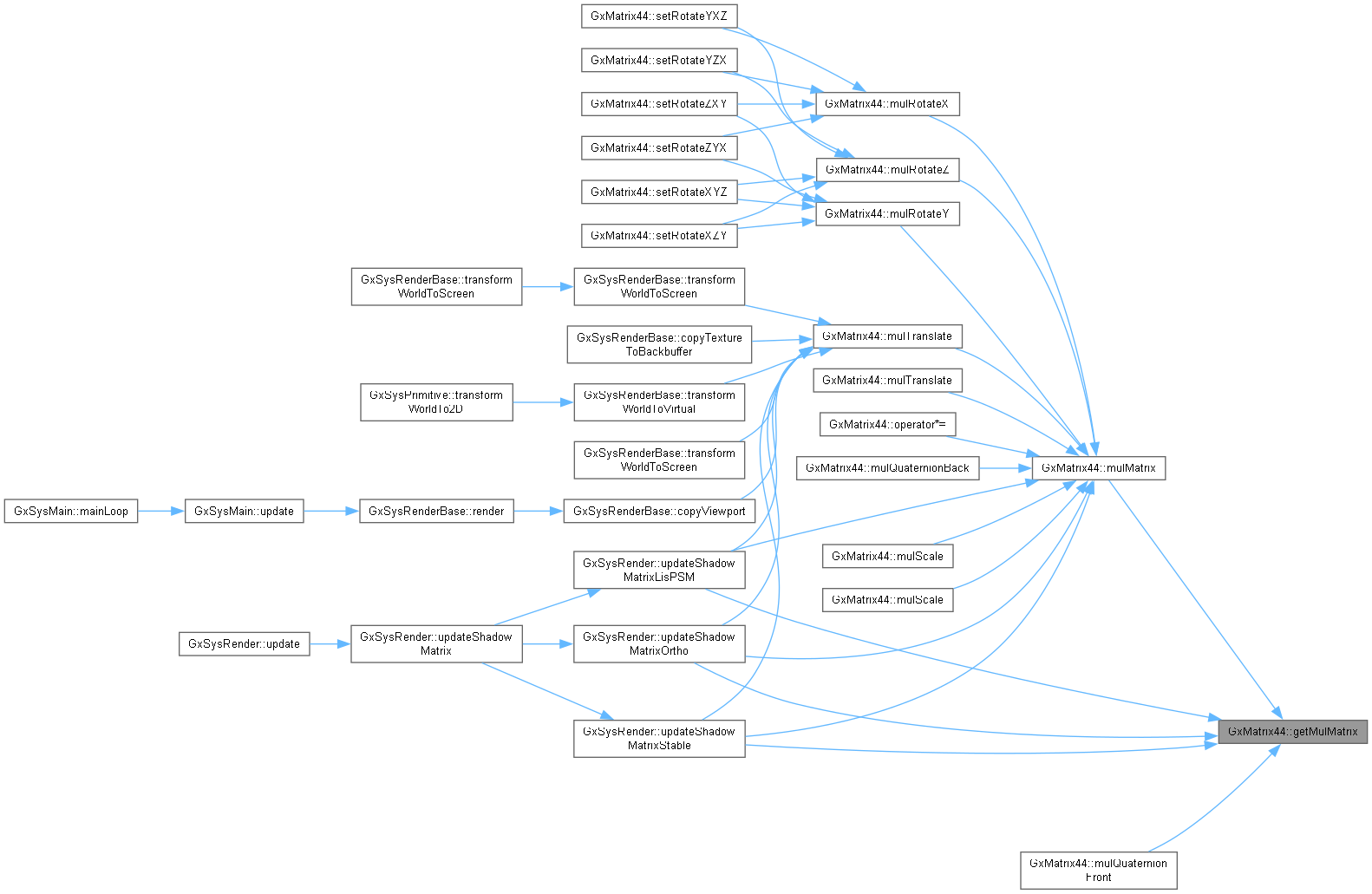
| static GX_FORCE_INLINE const GxMatrix44 & | getMulMatrix (GxMatrix44 &dst, const GxMatrix44 &matrix0, const GxMatrix44 &matrix1) |
| 行列乗算を取得 | |
| static GX_FORCE_INLINE const GxMatrix44 & | getInverse (GxMatrix44 &dst, const GxMatrix44 &matrix) |
| 逆行列を取得 | |
| static GX_FORCE_INLINE const GxMatrix44 & | getTranspose (GxMatrix44 &dst, const GxMatrix44 &matrix) |
| 転置行列を取得 | |
Additional Inherited Members | |
 Static Public Member Functions inherited from GxStructBase Static Public Member Functions inherited from GxStructBase | |
| static GxRtti & | __getStaticRtti (void) |
4×4行列(行優先)
| GX_INLINE GxMatrix44::GxMatrix44 | ( | INIT | initType | ) |
コンストラクタ(引数のタイプで要素を初期化する)
| initType | [in] 初期化タイプ |
| GX_INLINE GxMatrix44::GxMatrix44 | ( | const GxQuaternion & | quaternion, |
| const GxVector3 & | position ) |
コンストラクタ
| quaternion | [in] 回転 |
| position | [in] 位置 |
| GX_INLINE GxMatrix44::GxMatrix44 | ( | const GxQuaternion & | quaternion | ) |
コンストラクタ
| quaternion | [in] 回転 |

| GX_INLINE GxMatrix44::GxMatrix44 | ( | const GxVector3 & | position | ) |
コンストラクタ
| position | [in] 位置 |

| GX_INLINE GxMatrix44::GxMatrix44 | ( | const GxMatrixAffine & | matrix | ) |
コンストラクタ
| matrix | [in] 行列 |
| GX_INLINE GxMatrix44::GxMatrix44 | ( | const GxMatrix44 & | matrix | ) |
コピーコンストラクタ
| matrix | [in] 行列 |
| GX_FORCE_INLINE const GxMatrix44 & GxMatrix44::addMatrix | ( | const GxMatrix44 & | matrix | ) |
行列加算
| matrix | [in] 行列 |

| GX_FORCE_INLINE const GxMatrix44 & GxMatrix44::divScalar | ( | f32 | scalar | ) |
スカラ除算
| scalar | [in] スカラ |

|
static |
行列加算を取得
| dst | [out] 出力先 |
| matrix0 | [in] 行列 |
| matrix1 | [in] 行列 |
| GxVector4 GxMatrix44::getColumn | ( | u32 | column | ) | const |
列を取得
| column | [in] 列番号 |
| GX_FORCE_INLINE f32 GxMatrix44::getDeterminant | ( | void | ) | const |
行列式の値を取得


|
static |
スカラ除算を取得
| dst | [out] 出力先 |
| matrix | [in] 行列 |
| scalar | [in] スカラ |
|
static |
逆行列を取得
| dst | [out] 出力先 |
| matrix | [in] 行列 |

| GX_FORCE_INLINE GxMatrix44 GxMatrix44::getInverse | ( | void | ) | const |
逆行列を取得

|
static |
2つの軸とベクトルから行列を取得
| axis0 | [in] 軸0 |
| vector0 | [in] ベクトル0 |
| axis1 | [in] 軸1 |
| vector1 | [in] ベクトル1 |

|
static |
行列乗算を取得
| dst | [out] 出力先 |
| matrix0 | [in] 行列 |
| matrix1 | [in] 行列 |
|
static |
スカラ乗算を取得
| dst | [out] 出力先 |
| matrix | [in] 行列 |
| scalar | [in] スカラ |
| GX_FORCE_INLINE GxMatrix44 GxMatrix44::getNormalizeAxes | ( | void | ) | const |
位置以外の各軸を正規化したものを取得

| f32 & GxMatrix44::getReference | ( | u32 | row, |
| u32 | column ) |
参照を取得
| row | [in] 行番号 |
| column | [in] 列番号 |
| const f32 & GxMatrix44::getReference | ( | u32 | row, |
| u32 | column ) const |
参照を取得
| row | [in] 行番号 |
| column | [in] 列番号 |
| GX_FORCE_INLINE GxVector3 GxMatrix44::getRotateXYZ | ( | void | ) | const |
XYZ軸回転角を取得

| GX_FORCE_INLINE GxVector3 GxMatrix44::getRotateXZY | ( | void | ) | const |
XZY軸回転角を取得
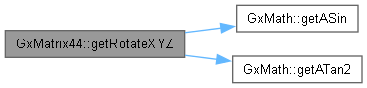
| GX_FORCE_INLINE GxVector3 GxMatrix44::getRotateYXZ | ( | void | ) | const |
YXZ軸回転角を取得
| GX_FORCE_INLINE GxVector3 GxMatrix44::getRotateYZX | ( | void | ) | const |
YZX軸回転角を取得
| GX_FORCE_INLINE GxVector3 GxMatrix44::getRotateZXY | ( | void | ) | const |
ZXY軸回転角を取得
| GX_FORCE_INLINE GxVector3 GxMatrix44::getRotateZYX | ( | void | ) | const |
ZYX軸回転角を取得
| const GxVector4 & GxMatrix44::getRow | ( | u32 | row | ) | const |
行を取得
| row | [in] 行番号 |
|
static |
転置行列を取得
| dst | [out] 出力先 |
| matrix | [in] 行列 |
| GX_FORCE_INLINE GxMatrix44 GxMatrix44::getTranspose | ( | void | ) | const |
転置行列を取得

| f32 GxMatrix44::getValue | ( | u32 | row, |
| u32 | column ) const |
値を取得
| row | [in] 行番号 |
| column | [in] 列番号 |
| GX_FORCE_INLINE void GxMatrix44::initialize | ( | const GxQuaternion & | quaternion, |
| const GxVector3 & | position ) |
初期化
| quaternion | [in] 回転 |
| position | [in] 位置 |
| GX_FORCE_INLINE const GxMatrix44 & GxMatrix44::inverse | ( | void | ) |
逆行列を計算する


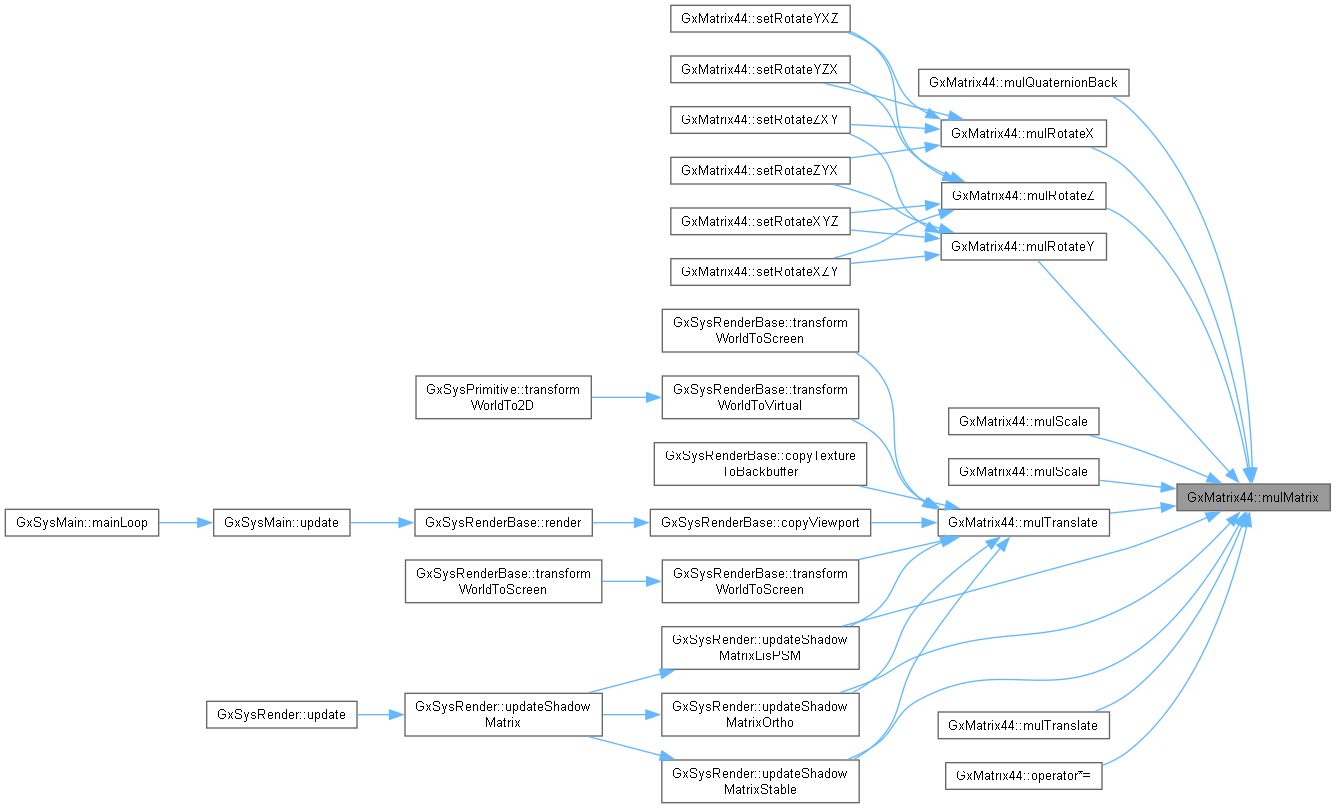
| GX_FORCE_INLINE const GxMatrix44 & GxMatrix44::mulMatrix | ( | const GxMatrix44 & | matrix | ) |
行列乗算
| matrix | [in] 行列 |

| GX_FORCE_INLINE const GxMatrix44 & GxMatrix44::mulQuaternionBack | ( | const GxQuaternion & | quaternion | ) |
クォータニオンによる回転乗算(後ろから乗算)
| quaternion | [in] クォータニオン |

| GX_FORCE_INLINE const GxMatrix44 & GxMatrix44::mulQuaternionFront | ( | const GxQuaternion & | quaternion | ) |
クォータニオンによる回転乗算(前から乗算)
| quaternion | [in] クォータニオン |

| GX_FORCE_INLINE const GxMatrix44 & GxMatrix44::mulRotateX | ( | f32 | radian | ) |
X軸回転乗算
| radian | [in] X軸回転量 |

| GX_FORCE_INLINE const GxMatrix44 & GxMatrix44::mulRotateY | ( | f32 | radian | ) |
Y軸回転乗算
| radian | [in] Y軸回転量 |

| GX_FORCE_INLINE const GxMatrix44 & GxMatrix44::mulRotateZ | ( | f32 | radian | ) |
Z軸回転乗算
| radian | [in] Z軸回転量 |

| GX_FORCE_INLINE const GxMatrix44 & GxMatrix44::mulScalar | ( | f32 | scalar | ) |
スカラ乗算
| scalar | [in] スカラ |

| GX_FORCE_INLINE const GxMatrix44 & GxMatrix44::mulScale | ( | const GxVector3 & | vector | ) |
スケール乗算
| vector | [in] スケール |

| GX_FORCE_INLINE const GxMatrix44 & GxMatrix44::mulScale | ( | f32 | x, |
| f32 | y, | ||
| f32 | z ) |
スケール乗算
| x | [in] スケールX |
| y | [in] スケールY |
| z | [in] スケールZ |

| GX_FORCE_INLINE const GxMatrix44 & GxMatrix44::mulTranslate | ( | const GxVector3 & | vector | ) |
平行移動乗算
| vector | [in] 平行移動量 |

| GX_FORCE_INLINE const GxMatrix44 & GxMatrix44::mulTranslate | ( | f32 | x, |
| f32 | y, | ||
| f32 | z ) |
平行移動乗算
| x | [in] 平行移動量X |
| y | [in] 平行移動量Y |
| z | [in] 平行移動量Z |

| GX_FORCE_INLINE b32 GxMatrix44::operator!= | ( | const GxMatrix44 & | matrix | ) |
不一致
| matrix | [in] 行列 |
| GX_FORCE_INLINE GxMatrix44 & GxMatrix44::operator*= | ( | const GxMatrix44 & | matrix | ) |
行列乗算代入
| matrix | [in] 行列 |

| GX_FORCE_INLINE GxMatrix44 & GxMatrix44::operator*= | ( | f32 | scalar | ) |
スカラ乗算代入
| scalar | [in] スカラ |

| GX_FORCE_INLINE GxMatrix44 & GxMatrix44::operator+= | ( | const GxMatrix44 & | matrix | ) |
行列加算代入
| matrix | [in] 行列 |

| GX_FORCE_INLINE GxMatrix44 & GxMatrix44::operator/= | ( | f32 | scalar | ) |
スカラ除算代入
| scalar | [in] スカラ |

| GX_FORCE_INLINE GxMatrix44 & GxMatrix44::operator= | ( | const GxMatrix44 & | matrix | ) |
代入
| matrix | [in] 行列 |
| GX_FORCE_INLINE b32 GxMatrix44::operator== | ( | const GxMatrix44 & | matrix | ) |
一致
| matrix | [in] 行列 |
| void GxMatrix44::setColumn | ( | u32 | column, |
| const GxVector4 & | vector ) |
列を設定
| column | [in] 列番号 |
| vector | [in] 列の値 |
| void GxMatrix44::setFrustumLH | ( | f32 | left, |
| f32 | right, | ||
| f32 | top, | ||
| f32 | bottom, | ||
| f32 | nearZ, | ||
| f32 | farZ ) |
左手座標系・射影変換行列を設定
| left | [in] 左端 |
| right | [in] 右端 |
| top | [in] 上端 |
| bottom | [in] 下端 |
| nearZ | [in] 近クリップ |
| farZ | [in] 遠クリップ |
| void GxMatrix44::setFrustumRH | ( | f32 | left, |
| f32 | right, | ||
| f32 | top, | ||
| f32 | bottom, | ||
| f32 | nearZ, | ||
| f32 | farZ ) |
右手座標系・射影変換行列を設定
| left | [in] 左端 |
| right | [in] 右端 |
| top | [in] 上端 |
| bottom | [in] 下端 |
| nearZ | [in] 近クリップ |
| farZ | [in] 遠クリップ |

| void GxMatrix44::setLookAtLH | ( | const GxVector3 & | eyePosition, |
| const GxVector3 & | atPosition, | ||
| const GxVector3 & | up ) |
左手座標系・視点行列を設定
| eyePosition | [in] 視点 |
| atPosition | [in] 注視点 |
| up | [in] 上ベクトル |

| void GxMatrix44::setLookAtRH | ( | const GxVector3 & | eyePosition, |
| const GxVector3 & | atPosition, | ||
| const GxVector3 & | up ) |
右手座標系・視点行列を設定
| eyePosition | [in] 視点 |
| atPosition | [in] 注視点 |
| up | [in] 上ベクトル |


| void GxMatrix44::setOrthoLH | ( | f32 | left, |
| f32 | right, | ||
| f32 | top, | ||
| f32 | bottom, | ||
| f32 | nearZ, | ||
| f32 | farZ ) |
左手座標系・正射影変換行列を設定
| left | [in] 左端 |
| right | [in] 右端 |
| top | [in] 上端 |
| bottom | [in] 下端 |
| nearZ | [in] 近クリップ |
| farZ | [in] 遠クリップ |
| void GxMatrix44::setOrthoLH | ( | f32 | left, |
| f32 | right, | ||
| f32 | top, | ||
| f32 | bottom, | ||
| f32 | nearZ, | ||
| f32 | farZ, | ||
| const GxVector2 & | pixelOffset, | ||
| const GxSize & | viewportSize ) |
左手座標系・正射影変換行列を設定(ピクセルオフセット指定)
| left | [in] 左端 |
| right | [in] 右端 |
| top | [in] 上端 |
| bottom | [in] 下端 |
| nearZ | [in] 近クリップ |
| farZ | [in] 遠クリップ |
| pixelOffset | [in] ピクセルオフセット |
| viewportSize | [in] ビューポートサイズ |
| void GxMatrix44::setOrthoRH | ( | f32 | left, |
| f32 | right, | ||
| f32 | top, | ||
| f32 | bottom, | ||
| f32 | nearZ, | ||
| f32 | farZ ) |
右手座標系・正射影変換行列を設定
| left | [in] 左端 |
| right | [in] 右端 |
| top | [in] 上端 |
| bottom | [in] 下端 |
| nearZ | [in] 近クリップ |
| farZ | [in] 遠クリップ |

| void GxMatrix44::setOrthoRH | ( | f32 | left, |
| f32 | right, | ||
| f32 | top, | ||
| f32 | bottom, | ||
| f32 | nearZ, | ||
| f32 | farZ, | ||
| const GxVector2 & | pixelOffset, | ||
| const GxSize & | viewportSize ) |
右手座標系・正射影変換行列を設定(ピクセルオフセット指定)
| left | [in] 左端 |
| right | [in] 右端 |
| top | [in] 上端 |
| bottom | [in] 下端 |
| nearZ | [in] 近クリップ |
| farZ | [in] 遠クリップ |
| pixelOffset | [in] ピクセルオフセット |
| viewportSize | [in] ビューポートサイズ |
| void GxMatrix44::setPerspectiveFovLH | ( | f32 | nearZ, |
| f32 | farZ, | ||
| f32 | fov, | ||
| f32 | aspect ) |
左手座標系・射影変換行列を設定
| nearZ | [in] 近クリップ |
| farZ | [in] 遠クリップ |
| fov | [in] 画角 |
| aspect | [in] アスペクト比 |
| void GxMatrix44::setPerspectiveFovRH | ( | f32 | nearZ, |
| f32 | farZ, | ||
| f32 | fov, | ||
| f32 | aspect ) |
右手座標系・射影変換行列を設定
| nearZ | [in] 近クリップ |
| farZ | [in] 遠クリップ |
| fov | [in] 画角 |
| aspect | [in] アスペクト比 |

| void GxMatrix44::setPerspectiveFovRH | ( | f32 | nearZ, |
| f32 | farZ, | ||
| f32 | fov, | ||
| f32 | aspect, | ||
| const GxVector2 & | pixelOffset, | ||
| const GxSize & | viewportSize ) |
右手座標系・射影変換行列を設定(ピクセルオフセット指定)
| nearZ | [in] 近クリップ |
| farZ | [in] 遠クリップ |
| fov | [in] 画角 |
| aspect | [in] アスペクト比 |
| pixelOffset | [in] ピクセルオフセット |
| viewportSize | [in] ビューポートサイズ |

| GX_FORCE_INLINE void GxMatrix44::setPosition | ( | const GxVector3 & | position | ) |
平行移動量のみを設定
| position | [in] 平行移動量 |
| GX_FORCE_INLINE void GxMatrix44::setPosition | ( | f32 | x, |
| f32 | y, | ||
| f32 | z ) |
| GX_INLINE void GxMatrix44::setRotate | ( | const GxQuaternion & | quaternion | ) |
回転行列を設定
| quaternion | [in] クォータニオン |
| GX_FORCE_INLINE void GxMatrix44::setRotateAxis | ( | const GxVector3 & | vector, |
| f32 | radian ) |
回転行列を設定
| vector | [in] 回転軸 |
| radian | [in] 回転角 |
| GX_FORCE_INLINE void GxMatrix44::setRotateX | ( | f32 | sinValue, |
| f32 | cosValue ) |
回転行列を設定(X軸回転)
| sinValue | [in] sin(rad)の値 |
| cosValue | [in] cos(rad)の値 |
| GX_FORCE_INLINE void GxMatrix44::setRotateY | ( | f32 | sinValue, |
| f32 | cosValue ) |
回転行列を設定(Y軸回転)
| sinValue | [in] sin(rad)の値 |
| cosValue | [in] cos(rad)の値 |
| GX_FORCE_INLINE void GxMatrix44::setRotateZ | ( | f32 | sinValue, |
| f32 | cosValue ) |
回転行列を設定(Z軸回転)
| sinValue | [in] sin(rad)の値 |
| cosValue | [in] cos(rad)の値 |
| void GxMatrix44::setRow | ( | u32 | row, |
| const GxVector4 & | vector ) |
行を設定
| row | [in] 行番号 |
| vector | [in] 行の値 |

| GX_FORCE_INLINE void GxMatrix44::setScale | ( | const GxVector3 & | vector | ) |
スケール行列を設定
| vector | [in] スケール |
| GX_FORCE_INLINE void GxMatrix44::setScale | ( | f32 | x, |
| f32 | y, | ||
| f32 | z ) |
スケール行列を設定
| x | [in] スケールX |
| y | [in] スケールY |
| z | [in] スケールZ |
| GX_FORCE_INLINE void GxMatrix44::setTranslate | ( | const GxVector3 & | vector | ) |
平行移動行列を設定
| vector | [in] 平行移動量 |
| GX_FORCE_INLINE void GxMatrix44::setTranslate | ( | f32 | x, |
| f32 | y, | ||
| f32 | z ) |
平行移動行列を設定
| x | [in] 平行移動量X |
| y | [in] 平行移動量Y |
| z | [in] 平行移動量Z |
| void GxMatrix44::setValue | ( | u32 | row, |
| u32 | column, | ||
| f32 | value ) |
値を設定
| row | [in] 行番号 |
| column | [in] 列番号 |
| value | [in] 値 |
| GX_FORCE_INLINE const GxMatrix44 & GxMatrix44::transpose | ( | void | ) |
転置する
|
friend |
スカラ乗算
| matrix | [in] 行列 |
| scalar | [in] スカラ |
|
friend |
行列乗算
| matrix0 | [in] 行列 |
| matrix1 | [in] 行列 |
|
friend |
行列加算
| matrix0 | [in] 行列 |
| matrix1 | [in] 行列 |
|
friend |
スカラ除算
| matrix | [in] 行列 |
| scalar | [in] スカラ |