|
OROCHI
|

|
|
OROCHI
|
|
アフィン変換行列(行優先) More...
#include <GxMatrix.h>
Public Member Functions | |
初期化 | |
| GxMatrixAffine (void) | |
| デフォルトコンストラクタ(要素は全て0で初期化される) | |
| GX_INLINE | GxMatrixAffine (INIT initType) |
| コンストラクタ(引数のタイプで要素を初期化する) | |
| GX_INLINE | GxMatrixAffine (const GxQuaternion &quaternion, const GxVector3 &position) |
| コンストラクタ | |
| GX_INLINE | GxMatrixAffine (const GxQuaternion &quaternion) |
| コンストラクタ | |
| GX_INLINE | GxMatrixAffine (const GxVector3 &position) |
| コンストラクタ | |
| GX_INLINE | GxMatrixAffine (f32 m00, f32 m01, f32 m02, f32 m10, f32 m11, f32 m12, f32 m20, f32 m21, f32 m22, f32 m30, f32 m31, f32 m32) |
| コンストラクタ | |
| GX_INLINE | GxMatrixAffine (const GxMatrix44 &matrix) |
| コンストラクタ | |
| GX_INLINE | GxMatrixAffine (const GxVector3 &position, const GxMatrix33 &orientation) |
| コンストラクタ | |
| GX_INLINE | GxMatrixAffine (const GxMatrixAffine &matrix) |
| コピーコンストラクタ | |
| GX_FORCE_INLINE void | initialize (const GxQuaternion &quaternion, const GxVector3 &position) |
| 初期化 | |
操作 | |
| GX_FORCE_INLINE const GxMatrixAffine & | mulScalar (f32 scalar) |
| スカラ乗算 | |
| GX_FORCE_INLINE const GxMatrixAffine & | divScalar (f32 scalar) |
| スカラ除算 | |
| GX_FORCE_INLINE const GxMatrixAffine & | addMatrix (const GxMatrixAffine &matrix) |
| 行列加算 | |
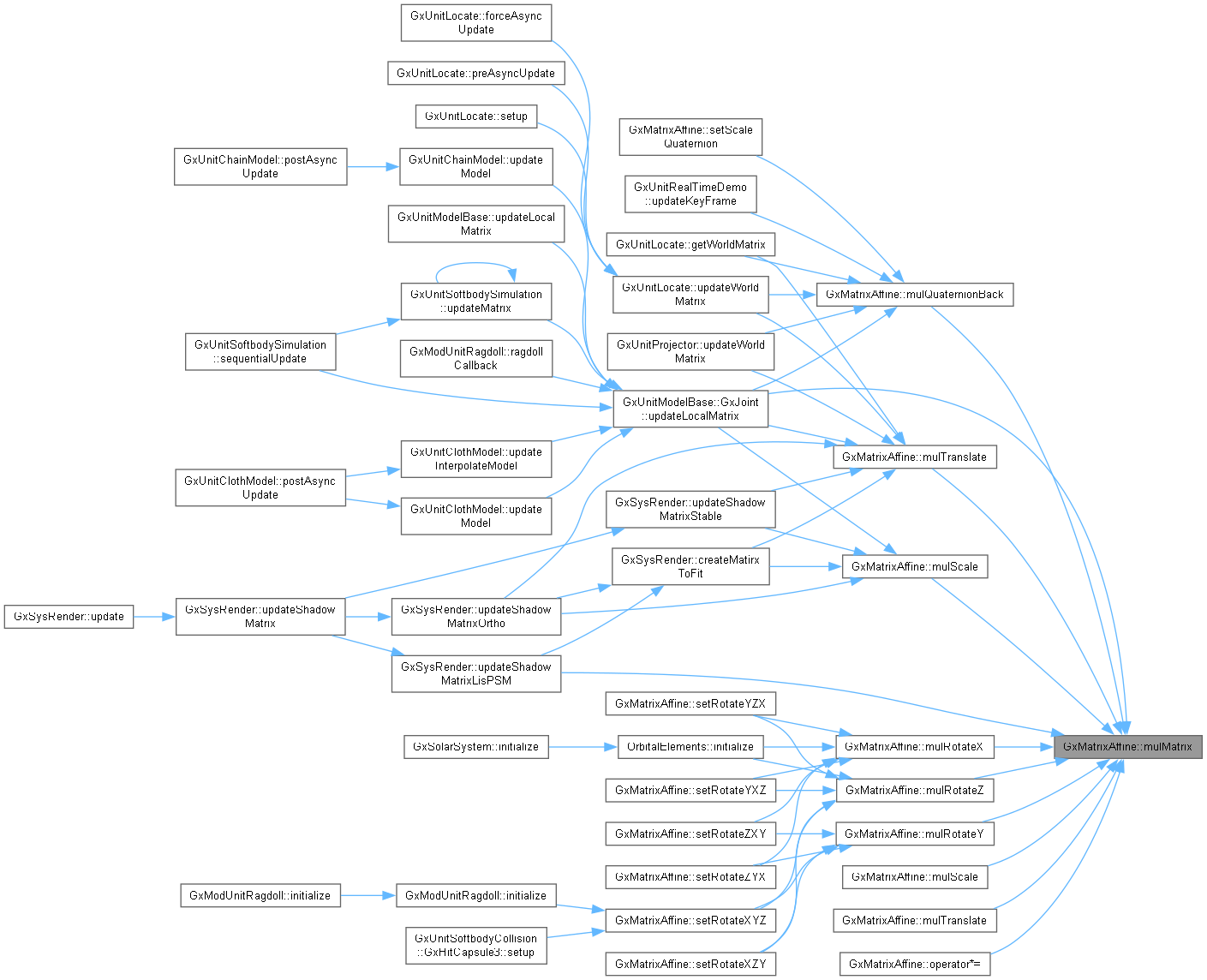
| GX_FORCE_INLINE const GxMatrixAffine & | mulMatrix (const GxMatrixAffine &matrix) |
| 行列乗算 | |
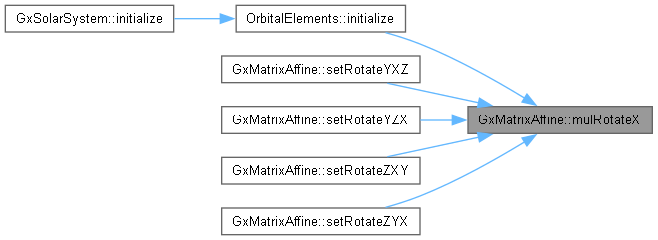
| GX_FORCE_INLINE const GxMatrixAffine & | mulRotateX (f32 radian) |
| X軸回転乗算 | |
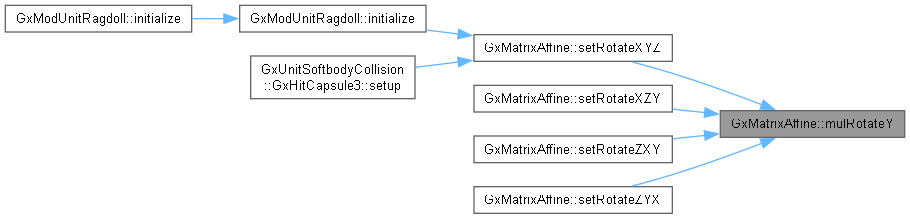
| GX_FORCE_INLINE const GxMatrixAffine & | mulRotateY (f32 radian) |
| Y軸回転乗算 | |
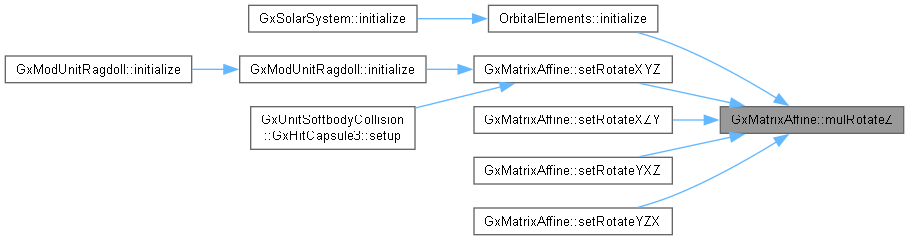
| GX_FORCE_INLINE const GxMatrixAffine & | mulRotateZ (f32 radian) |
| Z軸回転乗算 | |
| GX_FORCE_INLINE const GxMatrixAffine & | mulQuaternionFront (const GxQuaternion &quaternion) |
| クォータニオンによる回転乗算(前から乗算) | |
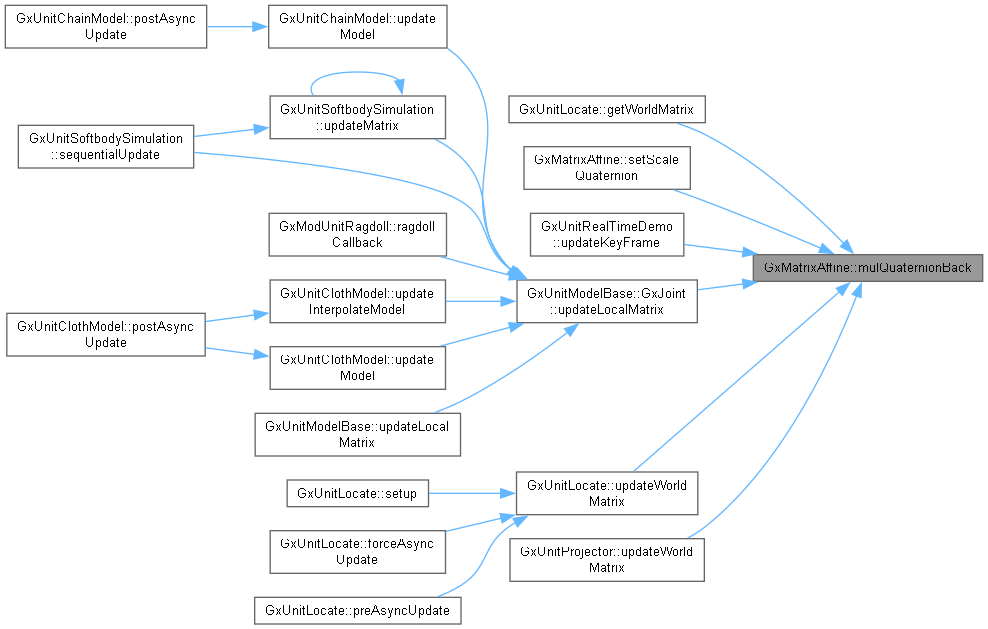
| GX_FORCE_INLINE const GxMatrixAffine & | mulQuaternionBack (const GxQuaternion &quaternion) |
| クォータニオンによる回転乗算(後ろから乗算) | |
| GX_FORCE_INLINE void | setScaleQuaternion (const GxVector3 &scale, const GxQuaternion &quaternion) |
| スケール行列を設定し、クォータニオンによる回転乗算(後ろから乗算)を行う | |
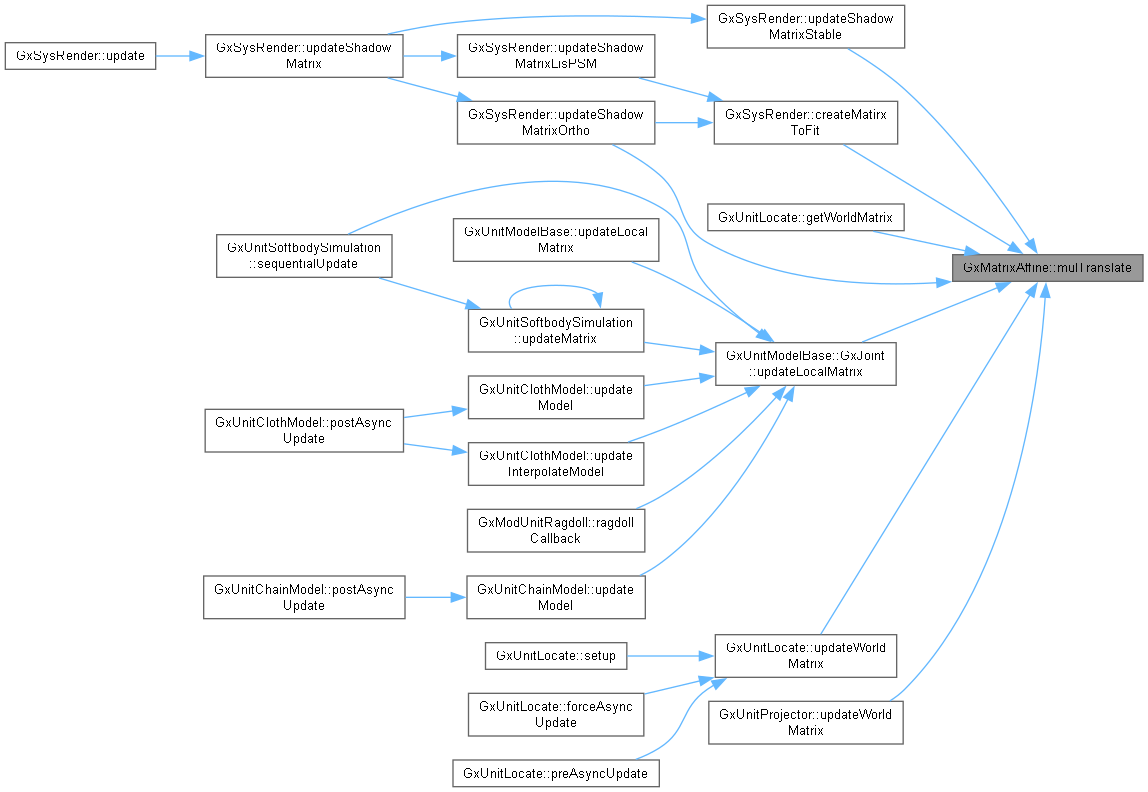
| GX_FORCE_INLINE const GxMatrixAffine & | mulTranslate (const GxVector3 &vector) |
| 平行移動乗算 | |
| GX_FORCE_INLINE const GxMatrixAffine & | mulTranslate (f32 x, f32 y, f32 z) |
| 平行移動乗算 | |
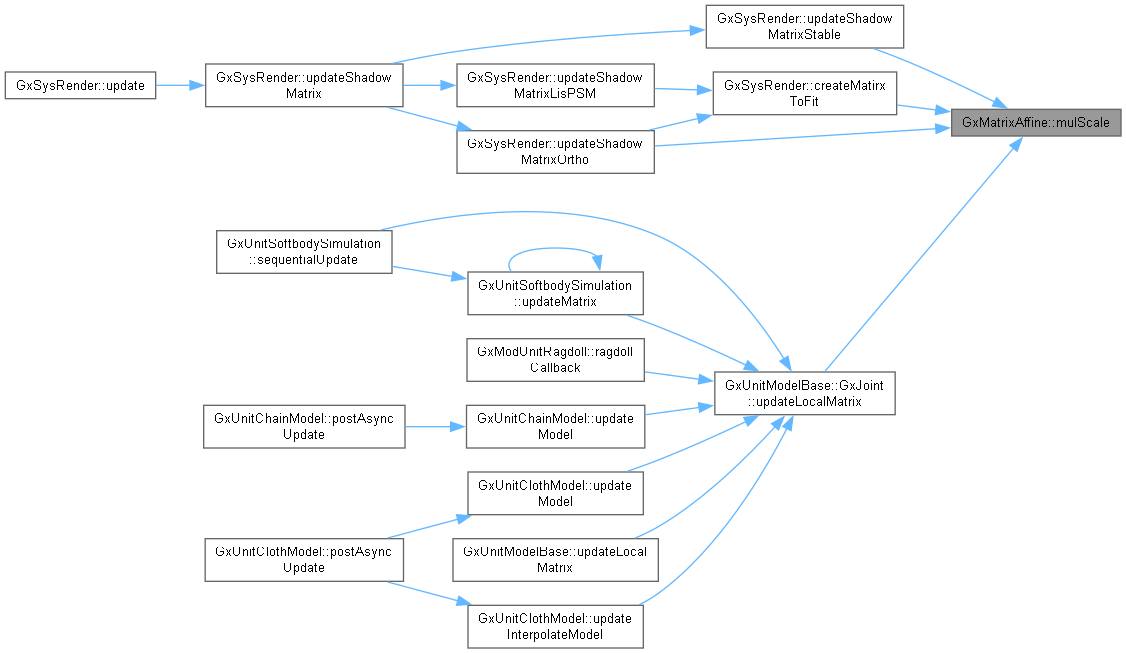
| GX_FORCE_INLINE const GxMatrixAffine & | mulScale (const GxVector3 &vector) |
| スケール乗算 | |
| GX_FORCE_INLINE const GxMatrixAffine & | mulScale (f32 x, f32 y, f32 z) |
| スケール乗算 | |
| GX_FORCE_INLINE const GxMatrixAffine & | inverse (void) |
| 逆行列にする | |
| GX_FORCE_INLINE const GxMatrixAffine & | transpose (void) |
| 転置する | |
| GX_FORCE_INLINE void | setZero (void) |
| 0を設定 | |
Public Attributes | |
メンバ変数 | |
| f32 | _m [4][4] |
| 値 | |
定義 | |
| static const GxMatrixAffine | ZERO |
| 0行列 | |
| static const GxMatrixAffine | IDENTITY |
| 単位行列 | |
| struct | GxMatrix44 |
| struct | GxMatrixAffineGpu |
演算子 | |
| GX_FORCE_INLINE const GxMatrixAffine | operator* (const GxMatrixAffine &matrix, f32 scalar) |
| スカラ乗算 | |
| GX_FORCE_INLINE const GxMatrixAffine | operator/ (const GxMatrixAffine &matrix, f32 scalar) |
| スカラ除算 | |
| GX_FORCE_INLINE const GxMatrixAffine | operator+ (const GxMatrixAffine &matrix0, const GxMatrixAffine &matrix1) |
| 行列加算 | |
| GX_FORCE_INLINE const GxMatrixAffine | operator* (const GxMatrixAffine &matrix0, const GxMatrixAffine &matrix1) |
| 行列乗算 | |
| GX_FORCE_INLINE GxMatrixAffine & | operator= (const GxMatrixAffine &matrix) |
| 代入 | |
| GX_FORCE_INLINE GxMatrixAffine & | operator*= (f32 scalar) |
| スカラ乗算代入 | |
| GX_FORCE_INLINE GxMatrixAffine & | operator/= (f32 scalar) |
| スカラ除算代入 | |
| GX_FORCE_INLINE GxMatrixAffine & | operator+= (const GxMatrixAffine &matrix) |
| 行列加算代入 | |
| GX_FORCE_INLINE GxMatrixAffine & | operator*= (const GxMatrixAffine &matrix) |
| 行列乗算代入 | |
| GX_FORCE_INLINE b32 | operator== (const GxMatrixAffine &matrix) |
| 一致 | |
| GX_FORCE_INLINE b32 | operator!= (const GxMatrixAffine &matrix) |
| 不一致 | |
アクセサ | |
| GX_FORCE_INLINE void | setIdentity (void) |
| 単位行列に設定 | |
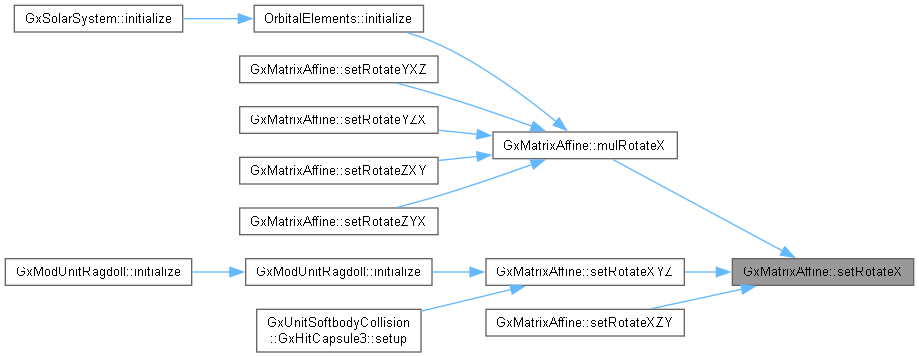
| GX_FORCE_INLINE void | setRotateX (f32 sinValue, f32 cosValue) |
| 回転行列を設定(X軸回転) | |
| GX_FORCE_INLINE void | setRotateX (f32 radian) |
| 回転行列を設定(X軸回転) | |
| GX_FORCE_INLINE void | setRotateY (f32 sinValue, f32 cosValue) |
| 回転行列を設定(Y軸回転) | |
| GX_FORCE_INLINE void | setRotateY (f32 radian) |
| 回転行列を設定(Y軸回転) | |
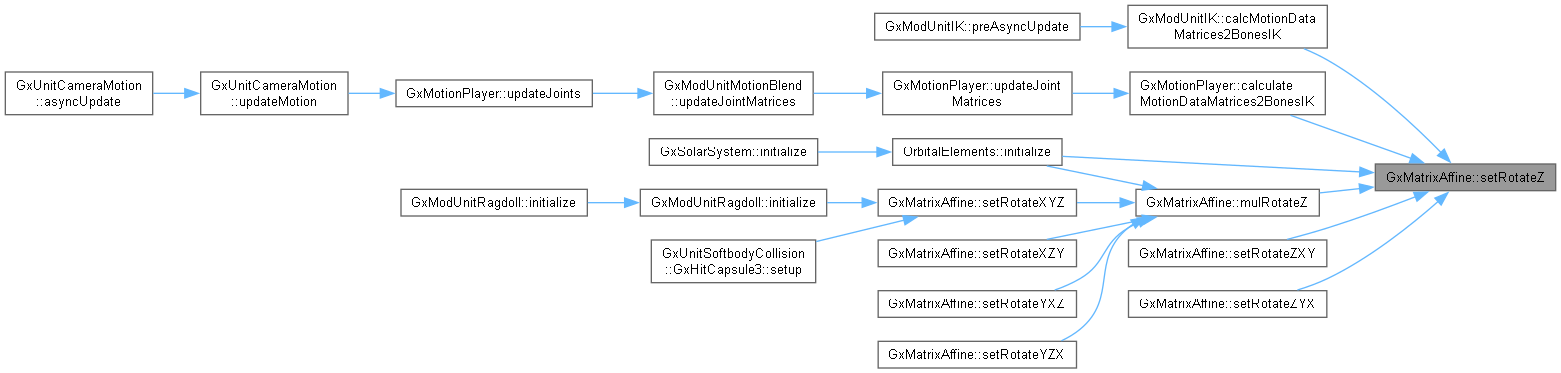
| GX_FORCE_INLINE void | setRotateZ (f32 sinValue, f32 cosValue) |
| 回転行列を設定(Z軸回転) | |
| GX_FORCE_INLINE void | setRotateZ (f32 radian) |
| 回転行列を設定(Z軸回転) | |
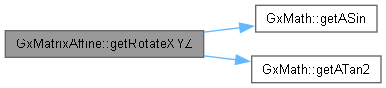
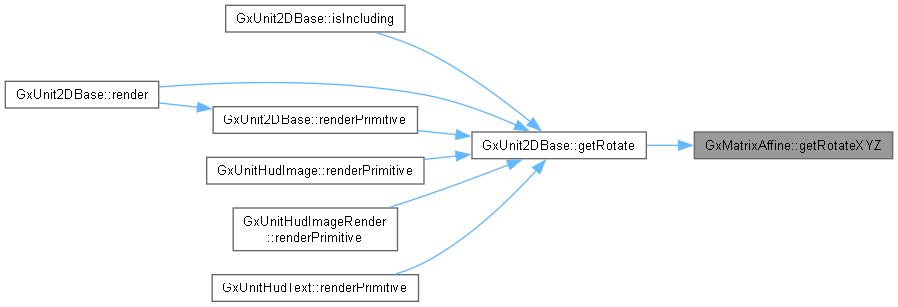
| GX_FORCE_INLINE GxVector3 | getRotateXYZ (void) const |
| XYZ軸回転角を取得 | |
| GX_FORCE_INLINE void | setRotateXYZ (f32 x, f32 y, f32 z) |
| 回転行列を設定(XYZ軸回転) | |
| GX_FORCE_INLINE GxVector3 | getRotateXZY (void) const |
| XZY軸回転角を取得 | |
| GX_FORCE_INLINE void | setRotateXZY (f32 x, f32 y, f32 z) |
| 回転行列を設定(XZY軸回転) | |
| GX_FORCE_INLINE GxVector3 | getRotateYXZ (void) const |
| YXZ軸回転角を取得 | |
| GX_FORCE_INLINE void | setRotateYXZ (f32 x, f32 y, f32 z) |
| 回転行列を設定(YXZ軸回転) | |
| GX_FORCE_INLINE GxVector3 | getRotateYZX (void) const |
| YZX軸回転角を取得 | |
| GX_FORCE_INLINE void | setRotateYZX (f32 x, f32 y, f32 z) |
| 回転行列を設定(YZX軸回転) | |
| GX_FORCE_INLINE GxVector3 | getRotateZXY (void) const |
| ZXY軸回転角を取得 | |
| GX_FORCE_INLINE void | setRotateZXY (f32 x, f32 y, f32 z) |
| 回転行列を設定(ZXY軸回転) | |
| GX_FORCE_INLINE GxVector3 | getRotateZYX (void) const |
| ZYX軸回転角を取得 | |
| GX_FORCE_INLINE void | setRotateZYX (f32 x, f32 y, f32 z) |
| 回転行列を設定(ZYX軸回転) | |
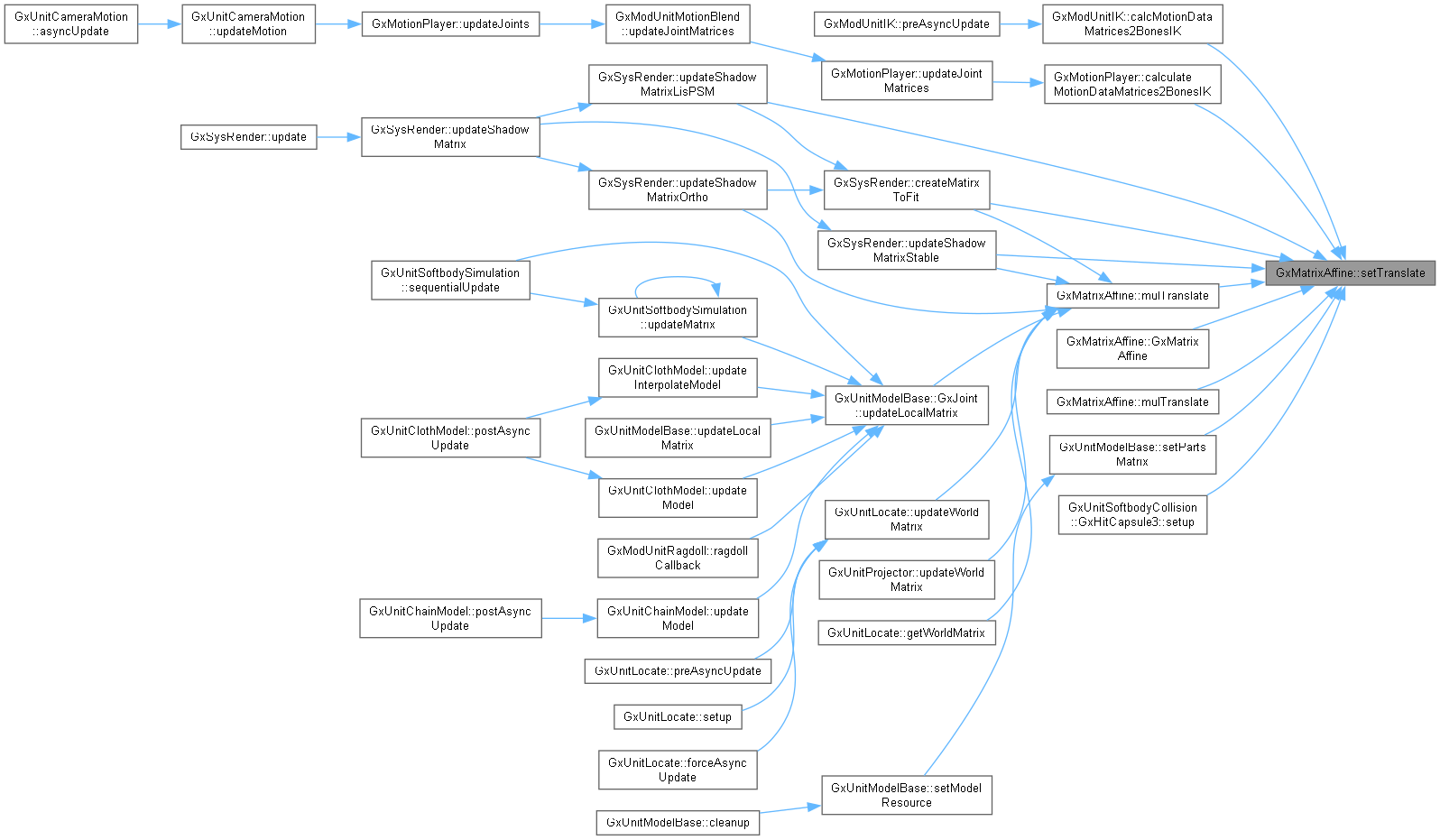
| GX_FORCE_INLINE void | setTranslate (const GxVector3 &vector) |
| 平行移動行列を設定 | |
| GX_FORCE_INLINE void | setTranslate (f32 x, f32 y, f32 z) |
| 平行移動行列を設定 | |
| GX_FORCE_INLINE const GxVector3 & | getPosition (void) const |
| 平行移動量を取得 | |
| GX_FORCE_INLINE const GxVector3 & | getXAxis (void) const |
| 平行移動量を取得 | |
| GX_FORCE_INLINE const GxVector3 & | getYAxis (void) const |
| 平行移動量を取得 | |
| GX_FORCE_INLINE const GxVector3 & | getZAxis (void) const |
| 平行移動量を取得 | |
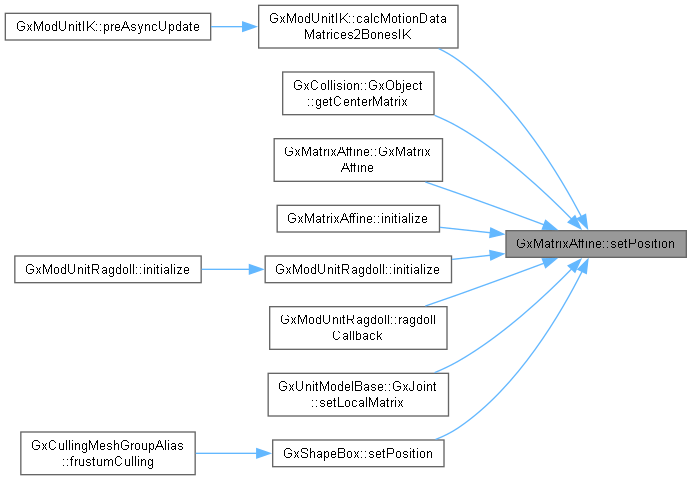
| GX_FORCE_INLINE void | setPosition (const GxVector3 &position) |
| 平行移動量のみを設定 | |
| GX_FORCE_INLINE void | setPosition (f32 x, f32 y, f32 z) |
| 平行移動量のみを設定 | |
| GX_FORCE_INLINE GxVector3 | getScale (void) const |
| スケールを取得 | |
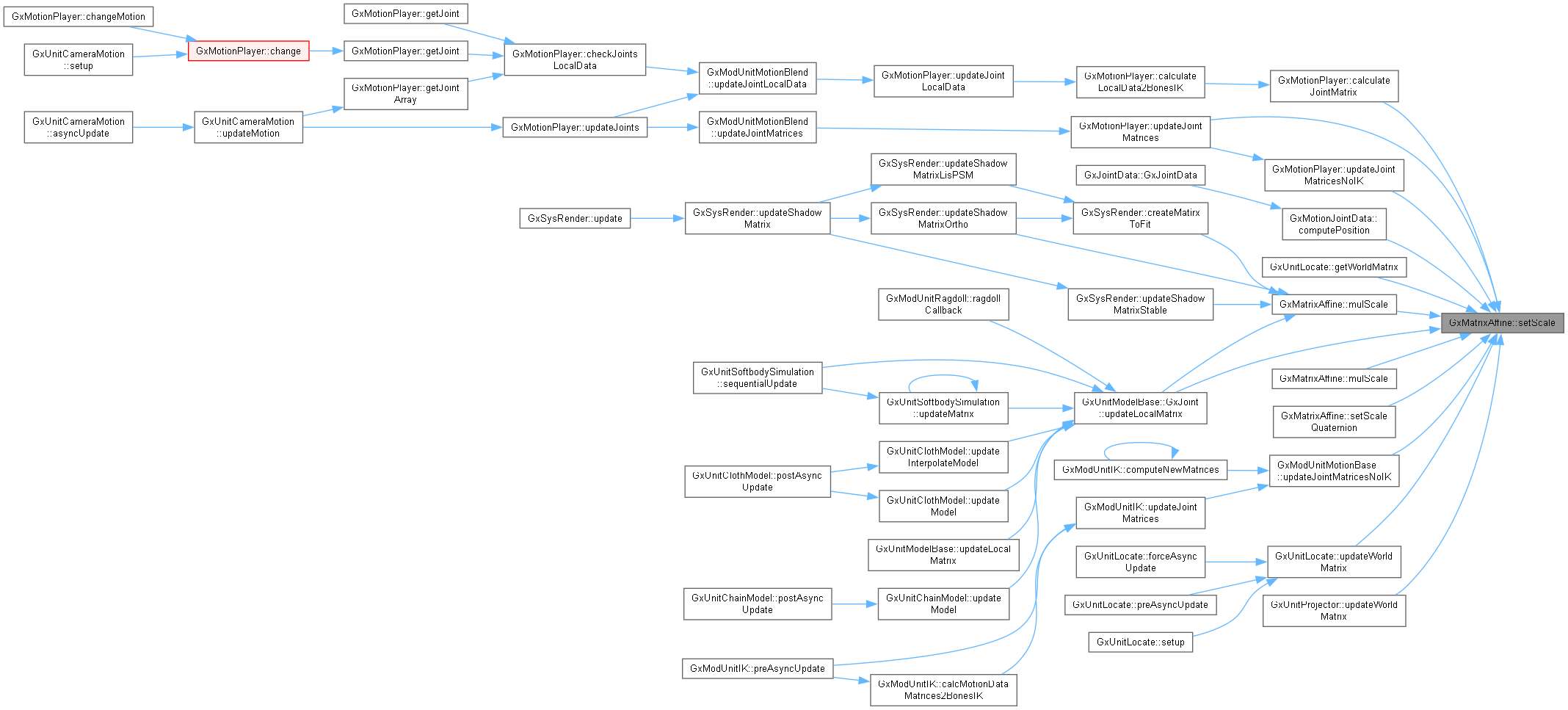
| GX_FORCE_INLINE void | setScale (const GxVector3 &vector) |
| スケール行列を設定 | |
| GX_FORCE_INLINE void | setScale (f32 x, f32 y, f32 z) |
| スケール行列を設定 | |
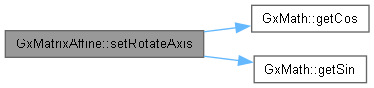
| GX_FORCE_INLINE void | setRotateAxis (const GxVector3 &vector, f32 radian) |
| 回転行列を設定 | |
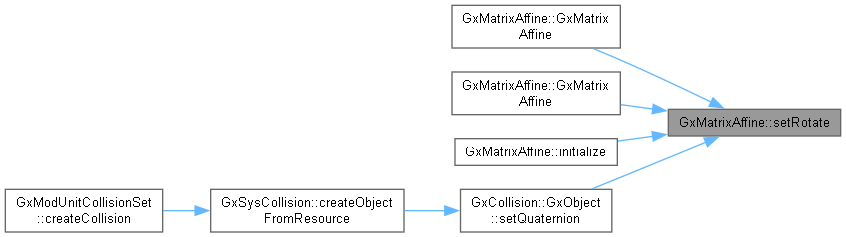
| GX_FORCE_INLINE void | setRotate (const GxQuaternion &quaternion) |
| 回転行列を設定 | |
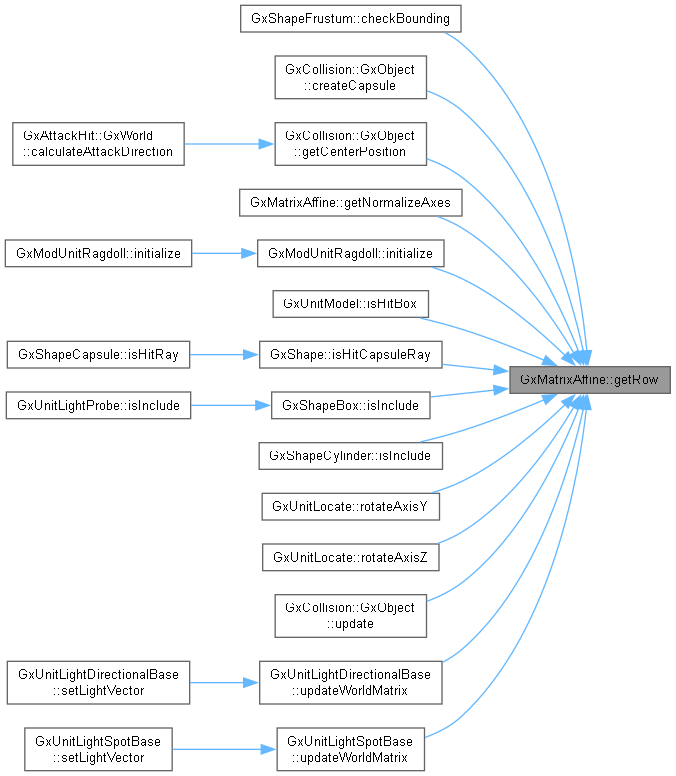
| GX_FORCE_INLINE const GxVector4 & | getRow (u32 row) const |
| 行を取得 | |
| GX_FORCE_INLINE const f32 * | getRowPtr (u32 row) const |
| 行を取得 | |
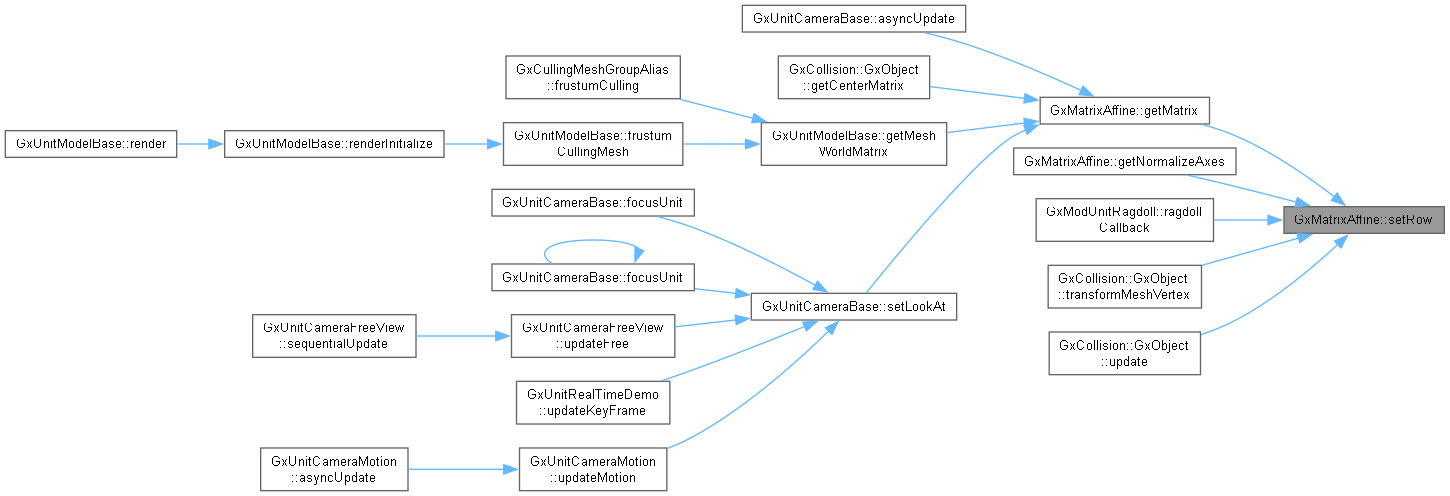
| GX_FORCE_INLINE void | setRow (u32 row, const GxVector4 &vector) |
| 行を設定 | |
| GX_FORCE_INLINE void | setRow (u32 row, const GxVector3 &vector) |
| 行を設定 | |
| GX_FORCE_INLINE GxVector4 | getColumn (u32 column) const |
| 列を取得 | |
| GX_FORCE_INLINE void | setColumn (u32 column, const GxVector4 &vector) |
| 列を設定 | |
| GX_FORCE_INLINE f32 | getValue (u32 row, u32 column) const |
| 値を取得 | |
| GX_FORCE_INLINE void | setValue (u32 row, u32 column, f32 value) |
| 値を設定 | |
| GX_FORCE_INLINE f32 & | getReference (u32 row, u32 column) |
| 参照を取得 | |
| GX_FORCE_INLINE const f32 & | getReference (u32 row, u32 column) const |
| 参照を取得 | |
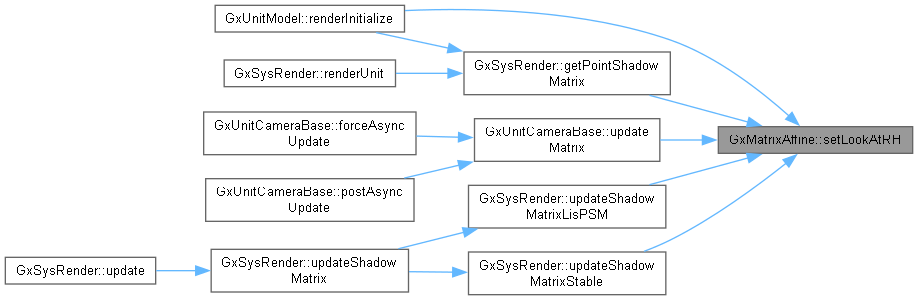
| void | setLookAtRH (const GxVector3 &eyePosition, const GxVector3 &atPosition, const GxVector3 &up) |
| 右手座標系・視点行列を設定 | |
| void | setLookAtLH (const GxVector3 &eyePosition, const GxVector3 &atPosition, const GxVector3 &up) |
| 左手座標系・視点行列を設定 | |
| GX_FORCE_INLINE f32 | getDeterminant (void) const |
| 行列式の値を取得 | |
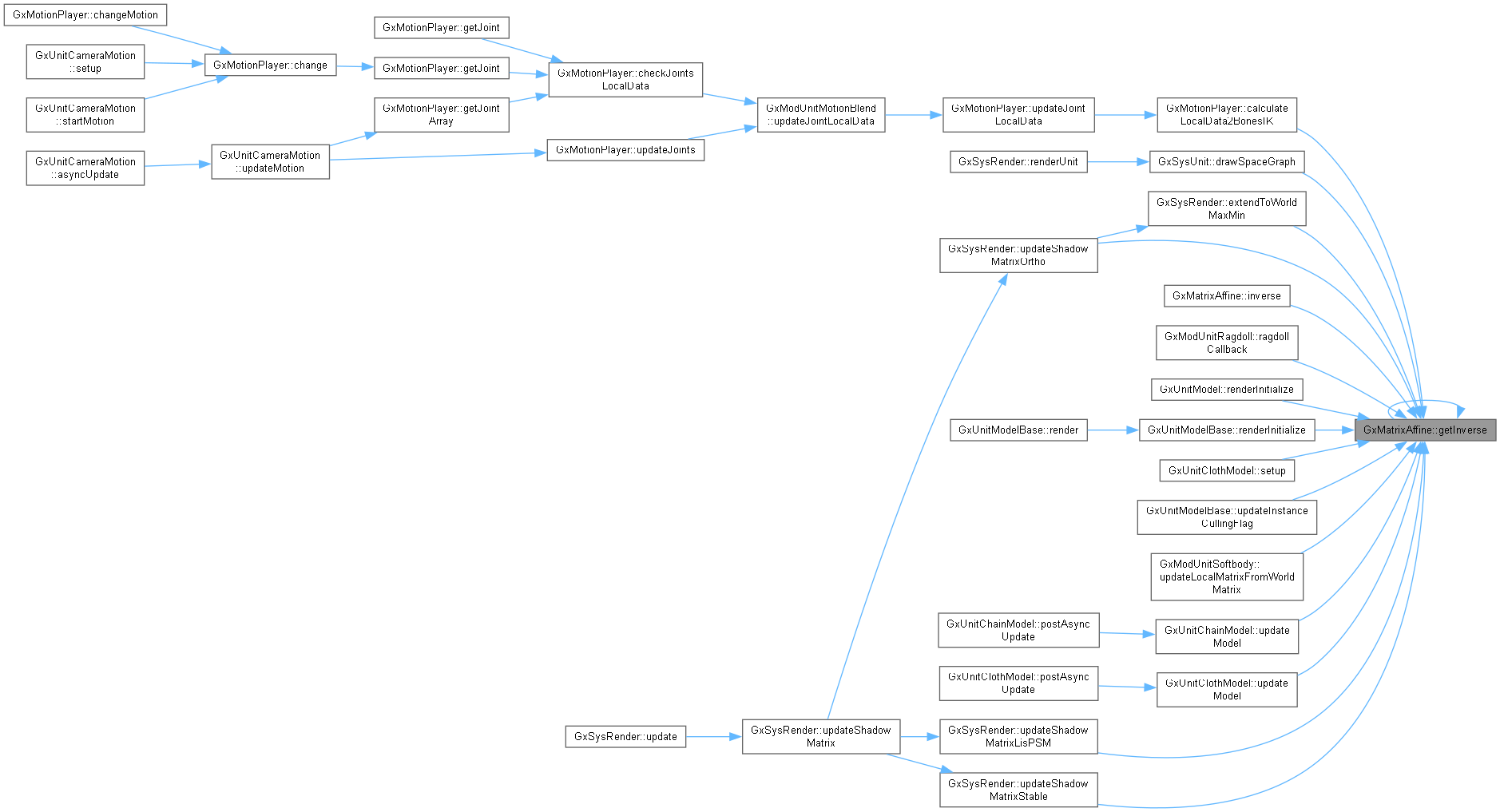
| GX_FORCE_INLINE GxMatrixAffine | getInverse (void) const |
| 逆行列を取得 | |
| GX_FORCE_INLINE GxMatrixAffine | getTranspose (void) const |
| 転置行列を取得 | |
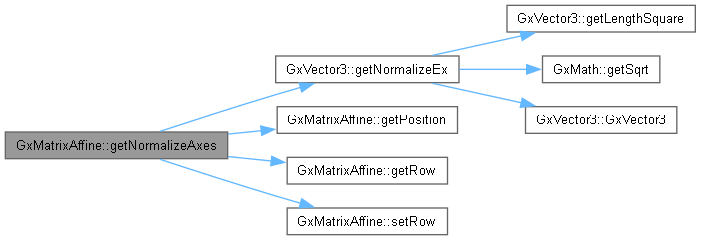
| GX_FORCE_INLINE GxMatrixAffine | getNormalizeAxes (void) const |
| 位置以外の各軸を正規化したものを取得 | |
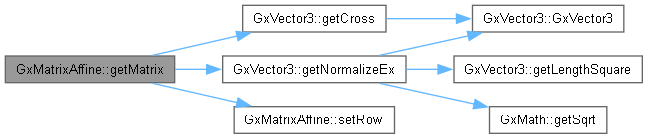
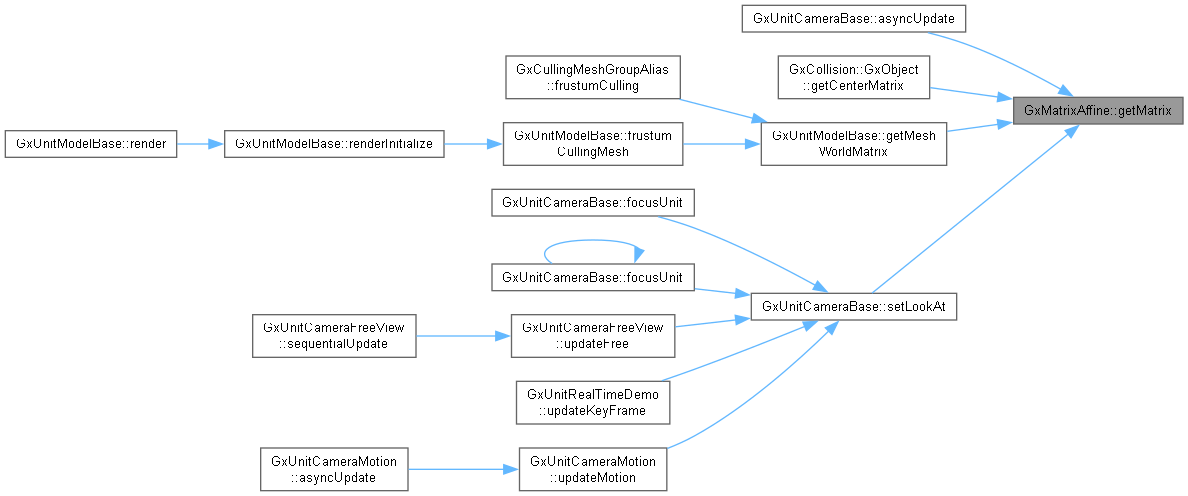
| static GxMatrixAffine | getMatrix (AXIS axis0, const GxVector3 &vector0, AXIS axis1, const GxVector3 &vector1) |
| 2つの軸とベクトルから行列を取得 | |
| static GX_FORCE_INLINE const GxMatrixAffine & | getMulScalar (GxMatrixAffine &dst, const GxMatrixAffine &matrix, f32 scalar) |
| スカラ乗算を取得 | |
| static GX_FORCE_INLINE const GxMatrixAffine & | getDivScalar (GxMatrixAffine &dst, const GxMatrixAffine &matrix, f32 scalar) |
| スカラ除算を取得 | |
| static GX_FORCE_INLINE const GxMatrixAffine & | getAddMatrix (GxMatrixAffine &dst, const GxMatrixAffine &matrix0, const GxMatrixAffine &matrix1) |
| 行列加算を取得 | |
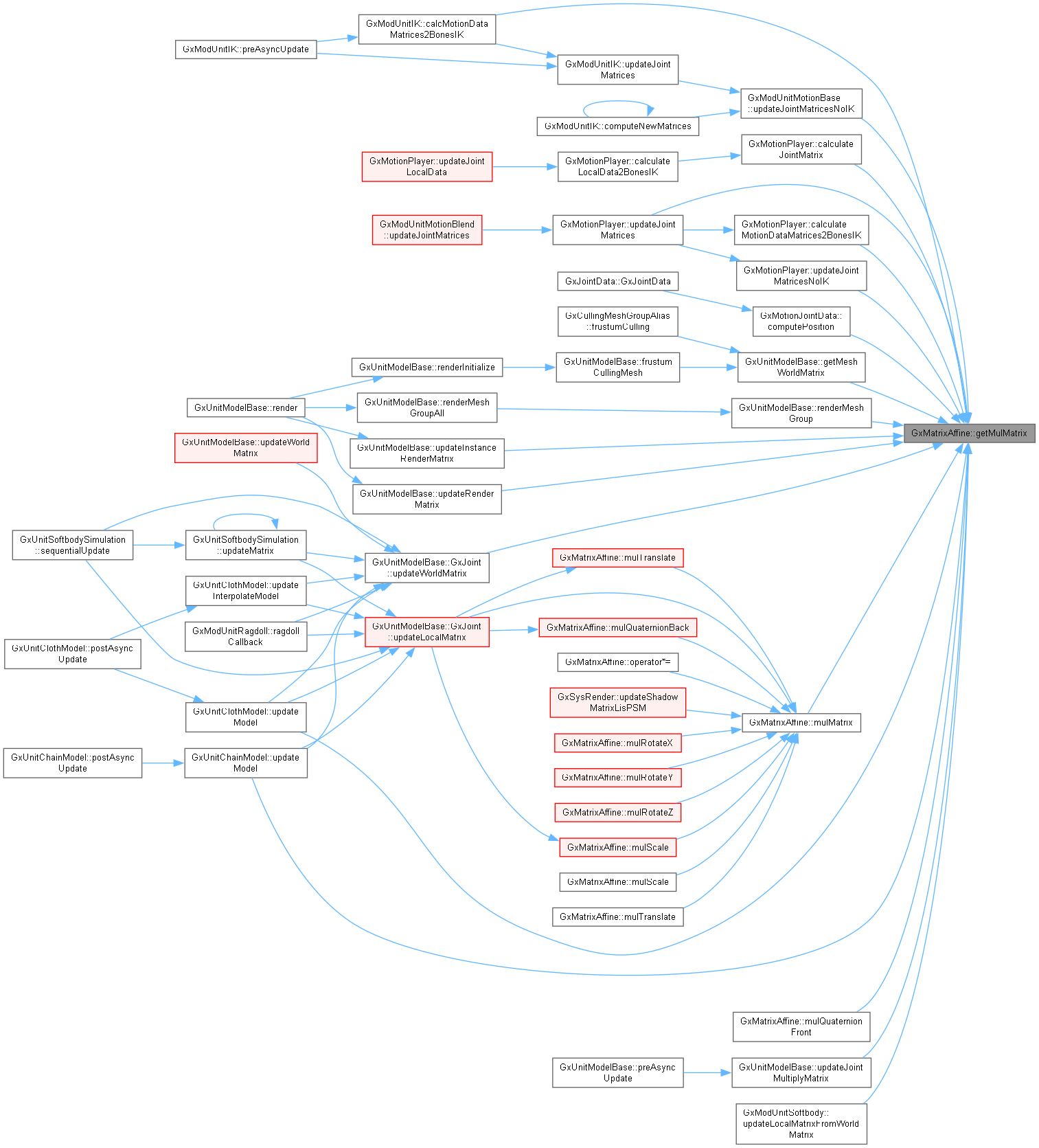
| static GX_FORCE_INLINE const GxMatrixAffine & | getMulMatrix (GxMatrixAffine &dst, const GxMatrixAffine &matrix0, const GxMatrixAffine &matrix1) |
| 行列乗算を取得 | |
| static GX_FORCE_INLINE const GxMatrixAffineGpu & | getMulMatrix (GxMatrixAffineGpu &dst, const GxMatrixAffine &matrix0, const GxMatrixAffine &matrix1) |
| 行列乗算を取得 | |
| static GX_FORCE_INLINE const GxMatrixAffine & | getInverse (GxMatrixAffine &dst, const GxMatrixAffine &matrix) |
| 逆行列を取得 | |
| static GX_FORCE_INLINE const GxMatrixAffine & | getTranspose (GxMatrixAffine &dst, const GxMatrixAffine &matrix) |
| 転置行列を取得 | |
| static GX_FORCE_INLINE void | getFastMulMatrix (GxMatrixAffine &dst, const GxMatrixAffine &matrix0, const GxMatrixAffine &matrix1) |
| 高速版。dst と matrix0, matrix1 は重なってなならない。アドレスは simd 用にアライメントされななければならない。 | |
| static GX_FORCE_INLINE b32 | isSimdAlignment (const GxMatrixAffine &matrix) |
| simd 用にアライメントされているか調べる | |
Additional Inherited Members | |
 Static Public Member Functions inherited from GxStructBase Static Public Member Functions inherited from GxStructBase | |
| static GxRtti & | __getStaticRtti (void) |
アフィン変換行列(行優先)
| GX_INLINE GxMatrixAffine::GxMatrixAffine | ( | INIT | initType | ) |
コンストラクタ(引数のタイプで要素を初期化する)
| initType | [in] 初期化タイプ |
| GX_INLINE GxMatrixAffine::GxMatrixAffine | ( | const GxQuaternion & | quaternion, |
| const GxVector3 & | position ) |
コンストラクタ
| quaternion | [in] 回転 |
| position | [in] 位置 |
| GX_INLINE GxMatrixAffine::GxMatrixAffine | ( | const GxQuaternion & | quaternion | ) |
コンストラクタ
| quaternion | [in] 回転 |

| GX_INLINE GxMatrixAffine::GxMatrixAffine | ( | const GxVector3 & | position | ) |
コンストラクタ
| position | [in] 位置 |

| GX_INLINE GxMatrixAffine::GxMatrixAffine | ( | const GxMatrix44 & | matrix | ) |
コンストラクタ
| matrix | [in] 行列 |
| GX_INLINE GxMatrixAffine::GxMatrixAffine | ( | const GxVector3 & | position, |
| const GxMatrix33 & | orientation ) |
コンストラクタ
| position | [in] 位置 |
| orientation | [in] 姿勢記述マトリクス |
| GX_INLINE GxMatrixAffine::GxMatrixAffine | ( | const GxMatrixAffine & | matrix | ) |
コピーコンストラクタ
| matrix | [in] 行列 |
| GX_FORCE_INLINE const GxMatrixAffine & GxMatrixAffine::addMatrix | ( | const GxMatrixAffine & | matrix | ) |
行列加算
| matrix | [in] 行列 |

| GX_FORCE_INLINE const GxMatrixAffine & GxMatrixAffine::divScalar | ( | f32 | scalar | ) |
スカラ除算
| scalar | [in] スカラ |

|
static |
行列加算を取得
| dst | [out] 出力先 |
| matrix0 | [in] 行列 |
| matrix1 | [in] 行列 |
| GxVector4 GxMatrixAffine::getColumn | ( | u32 | column | ) | const |
列を取得
| column | [in] 列番号 |
| GX_FORCE_INLINE f32 GxMatrixAffine::getDeterminant | ( | void | ) | const |
行列式の値を取得

|
static |
スカラ除算を取得
| dst | [out] 出力先 |
| matrix | [in] 行列 |
| scalar | [in] スカラ |
|
static |
高速版。dst と matrix0, matrix1 は重なってなならない。アドレスは simd 用にアライメントされななければならない。
| dst | [out] 出力先。simd 命令用にアライメントされている必要がある。matrix0, matrix1 は同じ領域になってはならない。4要素目は計算される場合がある。 |
| matrix0 | [in] 行列。simd 命令用にアライメントされている必要がある。 |
| matrix1 | [in] 行列。simd 命令用にアライメントされている必要がある。 |
|
static |
逆行列を取得
| dst | [out] 出力先 |
| matrix | [in] 行列 |
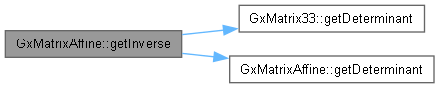
| GX_FORCE_INLINE GxMatrixAffine GxMatrixAffine::getInverse | ( | void | ) | const |
逆行列を取得

|
static |
2つの軸とベクトルから行列を取得
| axis0 | [in] 軸0 |
| vector0 | [in] ベクトル0 |
| axis1 | [in] 軸1 |
| vector1 | [in] ベクトル1 |
|
static |
行列乗算を取得
| dst | [out] 出力先 |
| matrix0 | [in] 行列 |
| matrix1 | [in] 行列 |
|
static |
行列乗算を取得
| dst | [out] 出力先 |
| matrix0 | [in] 行列 |
| matrix1 | [in] 行列 |
|
static |
スカラ乗算を取得
| dst | [out] 出力先 |
| matrix | [in] 行列 |
| scalar | [in] スカラ |
| GX_FORCE_INLINE GxMatrixAffine GxMatrixAffine::getNormalizeAxes | ( | void | ) | const |
位置以外の各軸を正規化したものを取得
| f32 & GxMatrixAffine::getReference | ( | u32 | row, |
| u32 | column ) |
参照を取得
| row | [in] 行番号 |
| column | [in] 列番号 |
| const f32 & GxMatrixAffine::getReference | ( | u32 | row, |
| u32 | column ) const |
参照を取得
| row | [in] 行番号 |
| column | [in] 列番号 |
| GX_FORCE_INLINE GxVector3 GxMatrixAffine::getRotateXYZ | ( | void | ) | const |
XYZ軸回転角を取得
| GX_FORCE_INLINE GxVector3 GxMatrixAffine::getRotateXZY | ( | void | ) | const |
XZY軸回転角を取得
| GX_FORCE_INLINE GxVector3 GxMatrixAffine::getRotateYXZ | ( | void | ) | const |
YXZ軸回転角を取得
| GX_FORCE_INLINE GxVector3 GxMatrixAffine::getRotateYZX | ( | void | ) | const |
YZX軸回転角を取得
| GX_FORCE_INLINE GxVector3 GxMatrixAffine::getRotateZXY | ( | void | ) | const |
ZXY軸回転角を取得
| GX_FORCE_INLINE GxVector3 GxMatrixAffine::getRotateZYX | ( | void | ) | const |
ZYX軸回転角を取得
| const GxVector4 & GxMatrixAffine::getRow | ( | u32 | row | ) | const |
行を取得
| row | [in] 行番号 |
| GX_FORCE_INLINE const f32 * GxMatrixAffine::getRowPtr | ( | u32 | row | ) | const |
行を取得
| row | [in] 行番号 |
|
static |
転置行列を取得
| dst | [out] 出力先 |
| matrix | [in] 行列 |
| GX_FORCE_INLINE GxMatrixAffine GxMatrixAffine::getTranspose | ( | void | ) | const |
転置行列を取得


| f32 GxMatrixAffine::getValue | ( | u32 | row, |
| u32 | column ) const |
値を取得
| row | [in] 行番号 |
| column | [in] 列番号 |

| GX_FORCE_INLINE void GxMatrixAffine::initialize | ( | const GxQuaternion & | quaternion, |
| const GxVector3 & | position ) |
初期化
| quaternion | [in] 回転 |
| position | [in] 位置 |
| GX_FORCE_INLINE const GxMatrixAffine & GxMatrixAffine::inverse | ( | void | ) |
逆行列にする

|
static |
simd 用にアライメントされているか調べる
| matrix | [in] 行列 |
| GX_FORCE_INLINE const GxMatrixAffine & GxMatrixAffine::mulMatrix | ( | const GxMatrixAffine & | matrix | ) |
行列乗算
| matrix | [in] 行列 |

| GX_FORCE_INLINE const GxMatrixAffine & GxMatrixAffine::mulQuaternionBack | ( | const GxQuaternion & | quaternion | ) |
クォータニオンによる回転乗算(後ろから乗算)
| quaternion | [in] クォータニオン |

| GX_FORCE_INLINE const GxMatrixAffine & GxMatrixAffine::mulQuaternionFront | ( | const GxQuaternion & | quaternion | ) |
クォータニオンによる回転乗算(前から乗算)
| quaternion | [in] クォータニオン |

| GX_FORCE_INLINE const GxMatrixAffine & GxMatrixAffine::mulRotateX | ( | f32 | radian | ) |
X軸回転乗算
| radian | [in] X軸回転量 |

| GX_FORCE_INLINE const GxMatrixAffine & GxMatrixAffine::mulRotateY | ( | f32 | radian | ) |
Y軸回転乗算
| radian | [in] Y軸回転量 |

| GX_FORCE_INLINE const GxMatrixAffine & GxMatrixAffine::mulRotateZ | ( | f32 | radian | ) |
Z軸回転乗算
| radian | [in] Z軸回転量 |

| GX_FORCE_INLINE const GxMatrixAffine & GxMatrixAffine::mulScalar | ( | f32 | scalar | ) |
スカラ乗算
| scalar | [in] スカラ |

| GX_FORCE_INLINE const GxMatrixAffine & GxMatrixAffine::mulScale | ( | const GxVector3 & | vector | ) |
スケール乗算
| vector | [in] スケール |

| GX_FORCE_INLINE const GxMatrixAffine & GxMatrixAffine::mulScale | ( | f32 | x, |
| f32 | y, | ||
| f32 | z ) |
スケール乗算
| x | [in] スケールX |
| y | [in] スケールY |
| z | [in] スケールZ |

| GX_FORCE_INLINE const GxMatrixAffine & GxMatrixAffine::mulTranslate | ( | const GxVector3 & | vector | ) |
平行移動乗算
| vector | [in] 平行移動量 |

| GX_FORCE_INLINE const GxMatrixAffine & GxMatrixAffine::mulTranslate | ( | f32 | x, |
| f32 | y, | ||
| f32 | z ) |
平行移動乗算
| x | [in] 平行移動量X |
| y | [in] 平行移動量Y |
| z | [in] 平行移動量Z |

| GX_FORCE_INLINE b32 GxMatrixAffine::operator!= | ( | const GxMatrixAffine & | matrix | ) |
不一致
| matrix | [in] 行列 |
| GX_FORCE_INLINE GxMatrixAffine & GxMatrixAffine::operator*= | ( | const GxMatrixAffine & | matrix | ) |
行列乗算代入
| matrix | [in] 行列 |

| GX_FORCE_INLINE GxMatrixAffine & GxMatrixAffine::operator*= | ( | f32 | scalar | ) |
スカラ乗算代入
| scalar | [in] スカラ |

| GX_FORCE_INLINE GxMatrixAffine & GxMatrixAffine::operator+= | ( | const GxMatrixAffine & | matrix | ) |
行列加算代入
| matrix | [in] 行列 |

| GX_FORCE_INLINE GxMatrixAffine & GxMatrixAffine::operator/= | ( | f32 | scalar | ) |
スカラ除算代入
| scalar | [in] スカラ |

| GX_FORCE_INLINE GxMatrixAffine & GxMatrixAffine::operator= | ( | const GxMatrixAffine & | matrix | ) |
代入
| matrix | [in] 行列 |
| GX_FORCE_INLINE b32 GxMatrixAffine::operator== | ( | const GxMatrixAffine & | matrix | ) |
一致
| matrix | [in] 行列 |
| void GxMatrixAffine::setColumn | ( | u32 | column, |
| const GxVector4 & | vector ) |
列を設定
| column | [in] 列番号 |
| vector | [in] 列の値 |
| void GxMatrixAffine::setLookAtLH | ( | const GxVector3 & | eyePosition, |
| const GxVector3 & | atPosition, | ||
| const GxVector3 & | up ) |
左手座標系・視点行列を設定
| eyePosition | [in] 視点 |
| atPosition | [in] 注視点 |
| up | [in] 上ベクトル |


| void GxMatrixAffine::setLookAtRH | ( | const GxVector3 & | eyePosition, |
| const GxVector3 & | atPosition, | ||
| const GxVector3 & | up ) |
右手座標系・視点行列を設定
| eyePosition | [in] 視点 |
| atPosition | [in] 注視点 |
| up | [in] 上ベクトル |

| GX_FORCE_INLINE void GxMatrixAffine::setPosition | ( | const GxVector3 & | position | ) |
平行移動量のみを設定
| position | [in] 平行移動量 |
| GX_FORCE_INLINE void GxMatrixAffine::setPosition | ( | f32 | x, |
| f32 | y, | ||
| f32 | z ) |
平行移動量のみを設定
| x | [in] 平行移動量X |
| y | [in] 平行移動量Y |
| z | [in] 平行移動量Z |
| GX_INLINE void GxMatrixAffine::setRotate | ( | const GxQuaternion & | quaternion | ) |
回転行列を設定
| quaternion | [in] クォータニオン |
| GX_FORCE_INLINE void GxMatrixAffine::setRotateAxis | ( | const GxVector3 & | vector, |
| f32 | radian ) |
回転行列を設定
| vector | [in] 回転軸 |
| radian | [in] 回転角 |
| GX_FORCE_INLINE void GxMatrixAffine::setRotateX | ( | f32 | sinValue, |
| f32 | cosValue ) |
回転行列を設定(X軸回転)
| sinValue | [in] sin(rad)の値 |
| cosValue | [in] cos(rad)の値 |
| GX_FORCE_INLINE void GxMatrixAffine::setRotateY | ( | f32 | sinValue, |
| f32 | cosValue ) |
回転行列を設定(Y軸回転)
| sinValue | [in] sin(rad)の値 |
| cosValue | [in] cos(rad)の値 |

| GX_FORCE_INLINE void GxMatrixAffine::setRotateZ | ( | f32 | sinValue, |
| f32 | cosValue ) |
回転行列を設定(Z軸回転)
| sinValue | [in] sin(rad)の値 |
| cosValue | [in] cos(rad)の値 |
| void GxMatrixAffine::setRow | ( | u32 | row, |
| const GxVector3 & | vector ) |
行を設定
| row | [in] 行番号 |
| vector | [in] 行の値 |
| void GxMatrixAffine::setRow | ( | u32 | row, |
| const GxVector4 & | vector ) |
行を設定
| row | [in] 行番号 |
| vector | [in] 行の値 |
| GX_FORCE_INLINE void GxMatrixAffine::setScale | ( | const GxVector3 & | vector | ) |
スケール行列を設定
| vector | [in] スケール |
| GX_FORCE_INLINE void GxMatrixAffine::setScale | ( | f32 | x, |
| f32 | y, | ||
| f32 | z ) |
スケール行列を設定
| x | [in] スケールX |
| y | [in] スケールY |
| z | [in] スケールZ |
| GX_FORCE_INLINE void GxMatrixAffine::setScaleQuaternion | ( | const GxVector3 & | scale, |
| const GxQuaternion & | quaternion ) |
スケール行列を設定し、クォータニオンによる回転乗算(後ろから乗算)を行う
| scale | [in] スケール |
| quaternion | [in] クォータニオン |

| GX_FORCE_INLINE void GxMatrixAffine::setTranslate | ( | const GxVector3 & | vector | ) |
平行移動行列を設定
| vector | [in] 平行移動量 |
| GX_FORCE_INLINE void GxMatrixAffine::setTranslate | ( | f32 | x, |
| f32 | y, | ||
| f32 | z ) |
平行移動行列を設定
| x | [in] 平行移動量X |
| y | [in] 平行移動量Y |
| z | [in] 平行移動量Z |
| void GxMatrixAffine::setValue | ( | u32 | row, |
| u32 | column, | ||
| f32 | value ) |
値を設定
| row | [in] 行番号 |
| column | [in] 列番号 |
| value | [in] 値 |
| GX_FORCE_INLINE const GxMatrixAffine & GxMatrixAffine::transpose | ( | void | ) |
転置する
|
friend |
スカラ乗算
| matrix | [in] 行列 |
| scalar | [in] スカラ |
|
friend |
行列乗算
| matrix0 | [in] 行列 |
| matrix1 | [in] 行列 |
|
friend |
行列加算
| matrix0 | [in] 行列 |
| matrix1 | [in] 行列 |
|
friend |
スカラ除算
| matrix | [in] 行列 |
| scalar | [in] スカラ |