|
OROCHI
|

|
|
OROCHI
|
|
RRT(Rapidly Random Tree)経路セットエリアクラス More...
#include <GxPathSet.h>
Public Types | |
定義 | |
| enum class | TREE_TYPE { GROUND , AIR } |
| ツリーのタイプ More... | |
 Public Types inherited from GxPathSet::GxPathSetArea Public Types inherited from GxPathSet::GxPathSetArea | |
| enum class | SEARCH_LENGTH { SHORT = 0 , LONG , MAX } |
| 探索距離 More... | |
| enum class | SEARCH_TYPE { NEAR_ = 0 , FAR_ , MAX } |
| 探索方法 More... | |
| enum | ATTRIBUTE { ATTRIBUTE_COLLISION_INVALID = (1 << 0) , ATTRIBUTE_TARGET_NEAR = (1 << 1) , ATTRIBUTE_TARGET_FAR = (1 << 2) } |
| ノード取得用属性 More... | |
Public Member Functions | |
初期化 | |
| GxPathSetAreaRRT (void) | |
| デフォルトコンストラクタ | |
| ~GxPathSetAreaRRT (void) override | |
| デストラクタ | |
探索用関数 | |
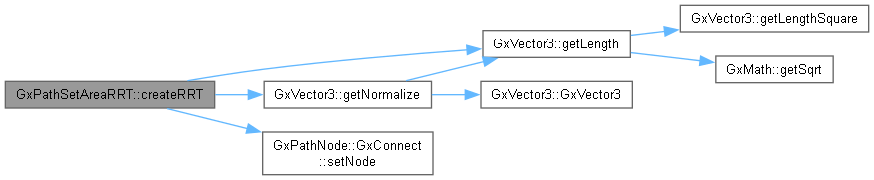
| void | createRRT (const GxVector3 &startPosition, const GxVector3 &goalPosition, TREE_TYPE treeType=TREE_TYPE::GROUND, f32 searchAreaSize=30.0f, f32 maxConnectLength=2.0f, u32 maxNode=32, f32 goalCheckDistance=2.0f) |
| RRT生成 | |
| Public Member Functions inherited from GxPathSet::GxPathSetArea | |
| GxPathSetArea (void) | |
| コンストラクタ | |
| ~GxPathSetArea (void) override | |
| デストラクタ | |
| void | createShape (GxResPathSet::GxAreaParam *pAreaParam) |
| 形状を作成 | |
| constexpr s32 | getId (void) const |
| IDを取得 | |
| constexpr void | setId (s32 id) |
| IDを設定 | |
| constexpr void | setShape (GxShape *pShape) |
| コリジョンの形状を設定 | |
| GX_FORCE_INLINE void | addNode (GxPathNode *pNode) |
| ノードを追加 | |
| void | addRoute (GxPath *pRoute, s32 id) |
| ルートを追加 | |
| void | eraseAllNode (void) |
| 全てのノードを削除 | |
| void | eraseAllRoute (void) |
| 全てのルートを削除 | |
| GxPathNode * | getNode (u32 id) |
| ノードを取得(ID指定) | |
| GxPathNode * | getNode (u32 dataIndex, s32 dataValue) |
| ノードを取得(データ指定) | |
| GxPathNode * | getNearNode (const GxVector3 &position, u32 attribute=0, const GxVector3 *pTargetPosition=nullptr) |
| 最も近いノードを取得 | |
| GxPathNode * | getFarNode (const GxVector3 &position) |
| 最も遠いノードを取得 | |
| b32 | isInclude (const GxVector3 &position) const |
| エリアに含まれるか判定 | |
| b32 | searchNoCost (GxPathNode *pStartNode, GxPathNode *pGoalNode, GxPath *pPath) |
| コスト無視探索 | |
| b32 | searchFast (GxPathNode *pStartNode, GxPathNode *pGoalNode, GxPath *pPath, GxClassBaseRoot *pObject, SEARCH_LENGTH length=SEARCH_LENGTH::SHORT) |
| 高速探索 | |
| b32 | searchAStar (GxPathNode *pStartNode, GxPathNode *pGoalNode, GxPath *pPath, GxClassBaseRoot *pObject, SEARCH_LENGTH length=SEARCH_LENGTH::SHORT) |
| A*探索 | |
| b32 | getRoute (s32 id, GxPath *pPath) const |
| 固定ルートを取得 | |
| Public Member Functions inherited from GxClassBase | |
| constexpr | GxClassBase (void) |
| コンストラクタ | |
| constexpr | GxClassBase (const GxClassBase &base) |
| コピーコンストラクタ | |
| ~GxClassBase (void) override | |
| デストラクタ | |
| Public Member Functions inherited from GxClassBaseRoot | |
| constexpr | GxClassBaseRoot (void) |
| コンストラクタ | |
| constexpr | GxClassBaseRoot (const GxClassBaseRoot &) |
| コピーコンストラクタ | |
| virtual | ~GxClassBaseRoot (void) |
| デストラクタ | |
| constexpr GxClassBaseRoot & | operator= (const GxClassBaseRoot &) |
| 代入演算子 | |
| virtual GxRtti & | getRtti (void) const =0 |
| Rttiの取得 | |
| virtual GX_FORCE_INLINE const GxTypedObject * | getDefaultObject (void) |
| デフォルトオブジェクトを取得 | |
| GX_FORCE_INLINE b32 | isDefaultObject (void) |
| デフォルトオブジェクト判定 | |
Additional Inherited Members | |
| Static Public Member Functions inherited from GxClassBaseRoot | |
| static GX_FORCE_INLINE GxRtti & | __getStaticRtti (void) |
| Rttiの取得 | |
| Protected Member Functions inherited from GxPathSet::GxPathSetArea | |
| b32 | checkCollision (const GxVector3 &startPosition, const GxVector3 &endPosition) |
| 衝突判定 | |
RRT(Rapidly Random Tree)経路セットエリアクラス
|
strong |
| void GxPathSetAreaRRT::createRRT | ( | const GxVector3 & | startPosition, |
| const GxVector3 & | goalPosition, | ||
| TREE_TYPE | treeType = TREE_TYPE::GROUND, | ||
| f32 | searchAreaSize = 30.0f, | ||
| f32 | maxConnectLength = 2.0f, | ||
| u32 | maxNode = 32, | ||
| f32 | goalCheckDistance = 2.0f ) |
RRT生成
| startPosition | [in] 開始座標 |
| goalPosition | [in] ゴール座標 |
| treeType | [in] 地上か空中か |
| searchAreaSize | [in] startPosを中心とした、ツリーの構築範囲 |
| maxConnectLength | [in] それぞれのノード間の距離、細かさ |
| maxNode | [in] ノードの最大数 |
| goalCheckDistance | [in] ゴール到着判定の許容距離 |