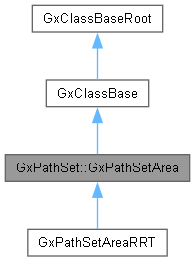
経路セットエリアクラス
More...
#include <GxPathSet.h>
|
|
|
| GxPathSetArea (void) |
| | コンストラクタ
|
| |
|
| ~GxPathSetArea (void) override |
| | デストラクタ
|
| |
| void | createShape (GxResPathSet::GxAreaParam *pAreaParam) |
| | 形状を作成
|
| |
|
constexpr | GxClassBase (void) |
| | コンストラクタ
|
| |
|
constexpr | GxClassBase (const GxClassBase &base) |
| | コピーコンストラクタ
|
| |
|
| ~GxClassBase (void) override |
| | デストラクタ
|
| |
|
constexpr | GxClassBaseRoot (void) |
| | コンストラクタ
|
| |
|
constexpr | GxClassBaseRoot (const GxClassBaseRoot &) |
| | コピーコンストラクタ
|
| |
|
virtual | ~GxClassBaseRoot (void) |
| | デストラクタ
|
| |
|
constexpr GxClassBaseRoot & | operator= (const GxClassBaseRoot &) |
| | 代入演算子
|
| |
|
virtual GxRtti & | getRtti (void) const =0 |
| | Rttiの取得
|
| |
| virtual GX_FORCE_INLINE const GxTypedObject * | getDefaultObject (void) |
| | デフォルトオブジェクトを取得
|
| |
|
GX_FORCE_INLINE b32 | isDefaultObject (void) |
| | デフォルトオブジェクト判定
|
| |
|
| b32 | isInclude (const GxVector3 &position) const |
| | エリアに含まれるか判定
|
| |
| b32 | searchNoCost (GxPathNode *pStartNode, GxPathNode *pGoalNode, GxPath *pPath) |
| | コスト無視探索
|
| |
| b32 | searchFast (GxPathNode *pStartNode, GxPathNode *pGoalNode, GxPath *pPath, GxClassBaseRoot *pObject, SEARCH_LENGTH length=SEARCH_LENGTH::SHORT) |
| | 高速探索
|
| |
| b32 | searchAStar (GxPathNode *pStartNode, GxPathNode *pGoalNode, GxPath *pPath, GxClassBaseRoot *pObject, SEARCH_LENGTH length=SEARCH_LENGTH::SHORT) |
| | A*探索
|
| |
| b32 | getRoute (s32 id, GxPath *pPath) const |
| | 固定ルートを取得
|
| |
| b32 | checkCollision (const GxVector3 &startPosition, const GxVector3 &endPosition) |
| | 衝突判定
|
| |
|
|
static GX_FORCE_INLINE GxRtti & | __getStaticRtti (void) |
| | Rttiの取得
|
| |
◆ ATTRIBUTE
ノード取得用属性
| Enumerator |
|---|
| ATTRIBUTE_COLLISION_INVALID | 衝突無効
|
| ATTRIBUTE_TARGET_NEAR | ターゲットから近いものを優先
|
| ATTRIBUTE_TARGET_FAR | ターゲットから遠いものを優先
|
◆ SEARCH_LENGTH
探索距離
| Enumerator |
|---|
| SHORT | 最短
|
| LONG | 最長
|
| MAX | 定義数
|
◆ SEARCH_TYPE
探索方法
| Enumerator |
|---|
| NEAR_ | 近づく
|
| FAR_ | 離れる
|
| MAX | 定義数
|
◆ addRoute()
| void GxPathSet::GxPathSetArea::addRoute |
( |
GxPath * | pRoute, |
|
|
s32 | id ) |
ルートを追加
- Parameters
-
| pRoute | [in] 追加ルート |
| id | [in] ルートID |
◆ checkCollision()
| b32 GxPathSet::GxPathSetArea::checkCollision |
( |
const GxVector3 & | startPosition, |
|
|
const GxVector3 & | endPosition ) |
|
protected |
衝突判定
- Parameters
-
| startPosition | [in] 開始点 |
| endPosition | [in] 終了点 |
- Returns
- 衝突したらtrue
◆ createShape()
◆ getFarNode()
最も遠いノードを取得
- Parameters
-
- Returns
- 取得ノード
◆ getNearNode()
| GxPathNode * GxPathSet::GxPathSetArea::getNearNode |
( |
const GxVector3 & | position, |
|
|
u32 | attribute = 0, |
|
|
const GxVector3 * | pTargetPosition = nullptr ) |
最も近いノードを取得
- Parameters
-
| position | [in] 座標 |
| attribute | [in] 属性 |
| pTargetPosition | [in] ターゲット座標(ターゲットに近付く方を優先) |
- Returns
- 取得ノード
◆ getNode() [1/2]
| GxPathNode * GxPathSet::GxPathSetArea::getNode |
( |
u32 | dataIndex, |
|
|
s32 | dataValue ) |
ノードを取得(データ指定)
- Parameters
-
| dataIndex | [in] データインデックス |
| dataValue | [in] データの値 |
- Returns
- 取得ノード
◆ getNode() [2/2]
| GxPathNode * GxPathSet::GxPathSetArea::getNode |
( |
u32 | id | ) |
|
ノードを取得(ID指定)
- Parameters
-
- Returns
- 取得ノード
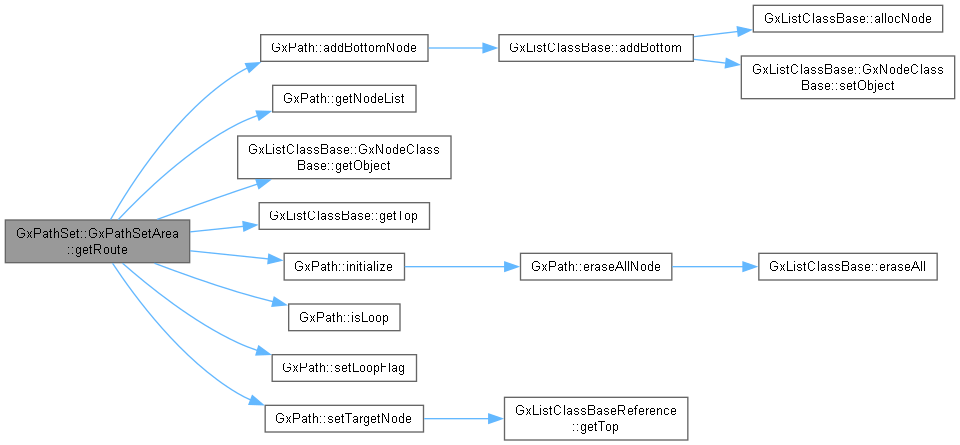
◆ getRoute()
| b32 GxPathSet::GxPathSetArea::getRoute |
( |
s32 | id, |
|
|
GxPath * | pPath ) const |
固定ルートを取得
- Parameters
-
| id | [in] ルートID |
| pPath | [in] 取得パス |
- Returns
- 成功ならtrue
◆ isInclude()
| b32 GxPathSet::GxPathSetArea::isInclude |
( |
const GxVector3 & | position | ) |
const |
エリアに含まれるか判定
- Parameters
-
- Returns
- 含まれていたらtrue
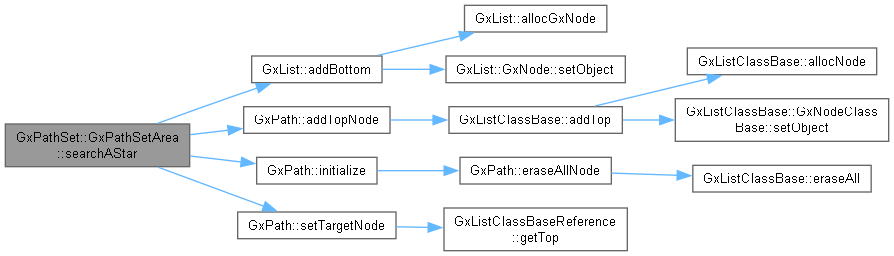
◆ searchAStar()
A*探索
- Parameters
-
| pStartNode | [in] 開始ノード |
| pGoalNode | [in] ゴールノード |
| pPath | [in] 取得パス |
| pObject | [in] コスト対象オブジェクト |
| length | [in] 探索距離(最長か最短か) |
- Returns
- 成功ならtrue
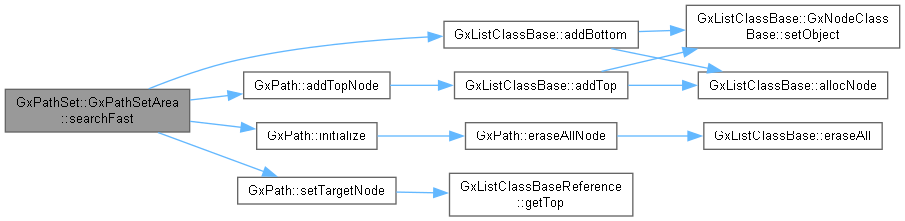
◆ searchFast()
高速探索
- Parameters
-
| pStartNode | [in] 開始ノード |
| pGoalNode | [in] ゴールノード |
| pPath | [in] 取得パス |
| pObject | [in] コスト対象オブジェクト |
| length | [in] 探索距離(最長か最短か) |
- Returns
- 成功ならtrue
◆ searchNoCost()
コスト無視探索
- Parameters
-
| pStartNode | [in] 開始ノード |
| pGoalNode | [in] ゴールノード |
| pPath | [in] 取得パス |
- Returns
- 成功ならtrue
The documentation for this class was generated from the following files:
- C:/Users/t-arai/Documents/workspace/orochi_package_windows/middleware/GxCharacter/src/GxPathSet.h
- C:/Users/t-arai/Documents/workspace/orochi_package_windows/middleware/GxCharacter/src/GxPathSet.cpp

 Public Member Functions inherited from GxClassBase
Public Member Functions inherited from GxClassBase