パスクラス
More...
#include <GxPathSet.h>
|
|
|
| GxPath (void) |
| | コンストラクタ
|
| |
|
| ~GxPath (void) override |
| | デストラクタ
|
| |
|
void | initialize (void) |
| | 初期化
|
| |
|
constexpr | GxClassBase (void) |
| | コンストラクタ
|
| |
|
constexpr | GxClassBase (const GxClassBase &base) |
| | コピーコンストラクタ
|
| |
|
| ~GxClassBase (void) override |
| | デストラクタ
|
| |
|
constexpr | GxClassBaseRoot (void) |
| | コンストラクタ
|
| |
|
constexpr | GxClassBaseRoot (const GxClassBaseRoot &) |
| | コピーコンストラクタ
|
| |
|
virtual | ~GxClassBaseRoot (void) |
| | デストラクタ
|
| |
|
constexpr GxClassBaseRoot & | operator= (const GxClassBaseRoot &) |
| | 代入演算子
|
| |
|
virtual GxRtti & | getRtti (void) const =0 |
| | Rttiの取得
|
| |
| virtual GX_FORCE_INLINE const GxTypedObject * | getDefaultObject (void) |
| | デフォルトオブジェクトを取得
|
| |
|
GX_FORCE_INLINE b32 | isDefaultObject (void) |
| | デフォルトオブジェクト判定
|
| |
|
| enum class | MOVE_TYPE { LINEAR
, SPLINE
, BEZIER
, TURN
} |
| | 移動方法 More...
|
| |
|
typedef void(GxClassBaseRoot::*) | ARRIVE_NODE_CALLBACK(GxPathNode *pNode) |
| | ノード到着コールバック定義
|
| |
|
static const f32 | GOAL_RANGE_DEFAULT = 0.3f |
| | 到着判定範囲
|
| |
|
static const f32 | TURN_RADIUS_DEFAULT = 0.9f |
| | 回転式の場合の半径
|
| |
|
|
GX_FORCE_INLINE void | addTopNode (GxPathNode *pNode) |
| | ノードを頭に追加
|
| |
|
GX_FORCE_INLINE void | addBottomNode (GxPathNode *pNode) |
| | ノードを末尾に追加
|
| |
| void | addPath (GxPath *pPath) |
| | パスを末尾に追加
|
| |
|
GX_FORCE_INLINE GxListClassBase * | getNodeList (void) |
| | ノードリストを取得
|
| |
|
void | eraseBottomNode (void) |
| | 末尾のノードを削除
|
| |
|
void | eraseAllNode (void) |
| | 全てのノードを削除
|
| |
|
constexpr void | setOwner (GxUnitLocate *pOwner) |
| | 所持者を設定
|
| |
|
GX_FORCE_INLINE void | setArriveNodeCallback (ARRIVE_NODE_CALLBACK pCallback) |
| | ノード到着コールバックを設定
|
| |
|
GX_FORCE_INLINE GxPathNode * | getTargetNode (void) const |
| | ターゲットノードを取得
|
| |
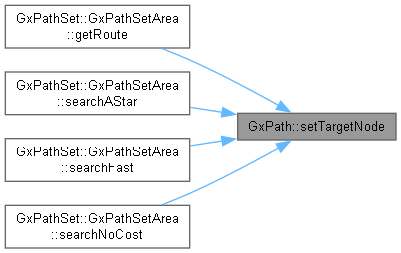
| void | setTargetNode (GxPathNode *pNode) |
| | ターゲットノードを設定
|
| |
|
GX_FORCE_INLINE GxPathNode * | getBeforeNode (void) const |
| | 以前のノードを取得
|
| |
|
GX_FORCE_INLINE GxPathNode * | getNextNode (void) const |
| | 次のノードを取得
|
| |
|
constexpr f32 | getGoalRange (void) const |
| | 到着判定距離を取得
|
| |
|
constexpr void | setGoalRange (f32 range) |
| | 到着判定距離を設定
|
| |
|
GX_FORCE_INLINE b32 | isGoal (void) const |
| | ゴールに着いたか判定
|
| |
|
GX_FORCE_INLINE void | setGoalFlag (b32 flag) |
| | ゴールフラグを設定
|
| |
|
GX_FORCE_INLINE b32 | isLoop (void) const |
| | ループさせるか判定
|
| |
|
GX_FORCE_INLINE void | setLoopFlag (b32 flag) |
| | ループさせるかフラグを設定
|
| |
|
constexpr MOVE_TYPE | getMoveType (void) const |
| | 移動方法の取得
|
| |
|
constexpr void | setMoveType (MOVE_TYPE type) |
| | 移動方法の設定
|
| |
|
constexpr void | setRadius (f32 radius) |
| | 回転半径の設定
|
| |
| virtual f32 | calculateCost (GxClassBaseRoot *pObject) |
| | コスト計算
|
| |
| void | getDirect (GxVector3 &direct) |
| | 方向ベクトルの取得
|
| |
| virtual b32 | isArrivedAtTargetNode (void) |
| | ノードに到達したかどうか取得
|
| |
|
|
static GX_FORCE_INLINE GxRtti & | __getStaticRtti (void) |
| | Rttiの取得
|
| |
◆ MOVE_TYPE
移動方法
| Enumerator |
|---|
| LINEAR | 直線移動
|
| SPLINE | Bスプライン移動
|
| BEZIER | ベジエ移動
|
| TURN | 回転移動
|
◆ addPath()
| void GxPath::addPath |
( |
GxPath * | pPath | ) |
|
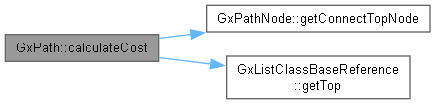
◆ calculateCost()
コスト計算
- Parameters
-
- Returns
- コスト値
◆ getDirect()
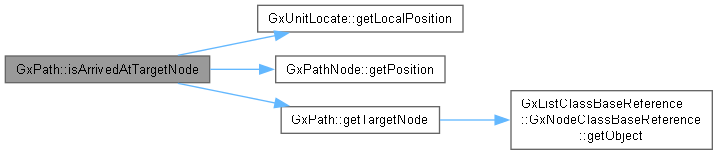
◆ isArrivedAtTargetNode()
| b32 GxPath::isArrivedAtTargetNode |
( |
void | | ) |
|
|
protectedvirtual |
ノードに到達したかどうか取得
- Returns
- ノードへの到達条件を満たしていたらtrue
◆ setTargetNode()
The documentation for this class was generated from the following files:
- C:/Users/t-arai/Documents/workspace/orochi_package_windows/middleware/GxCharacter/src/GxPathSet.h
- C:/Users/t-arai/Documents/workspace/orochi_package_windows/middleware/GxCharacter/src/GxPathSet.cpp

 Public Member Functions inherited from GxClassBase
Public Member Functions inherited from GxClassBase