|
OROCHI
|

|
|
OROCHI
|
|
インナークラス(関節のローカルデータを保存するクラス) More...
#include <GxJointData.h>
Public Member Functions | |
初期化 | |
| GxJointData (void) | |
| デフォルトコンストラクタ | |
| GxJointData (GxQuaternion const &rotate, GxVector3 const &translate, b32 isIk, GxVector3 const &ikTarget, b32 isScale, GxVector3 const &scale) | |
| コピーコンストラクタ | |
| GxJointData (GxMotionJoint const &joint) | |
| コピーコンストラクタ | |
| b32 | operator== (GxJointData const &other) const |
| 等価演算子 | |
| b32 | operator!= (GxJointData const &other) const |
| 非等価演算子 | |
操作 | |
| void | addLocalData (GxJointData const &other, f32 otherWeight, f32 thisWeight, u32 blendFlags, ROTATE_BLEND rotateBlendType) |
| ローカルデータを足す | |
 Public Member Functions inherited from GxClassBase Public Member Functions inherited from GxClassBase | |
| constexpr | GxClassBase (void) |
| コンストラクタ | |
| constexpr | GxClassBase (const GxClassBase &base) |
| コピーコンストラクタ | |
| ~GxClassBase (void) override | |
| デストラクタ | |
| Public Member Functions inherited from GxClassBaseRoot | |
| constexpr | GxClassBaseRoot (void) |
| コンストラクタ | |
| constexpr | GxClassBaseRoot (const GxClassBaseRoot &) |
| コピーコンストラクタ | |
| virtual | ~GxClassBaseRoot (void) |
| デストラクタ | |
| constexpr GxClassBaseRoot & | operator= (const GxClassBaseRoot &) |
| 代入演算子 | |
| virtual GxRtti & | getRtti (void) const =0 |
| Rttiの取得 | |
| virtual GX_FORCE_INLINE const GxTypedObject * | getDefaultObject (void) |
| デフォルトオブジェクトを取得 | |
| GX_FORCE_INLINE b32 | isDefaultObject (void) |
| デフォルトオブジェクト判定 | |
Public Attributes | |
メンバ変数 | |
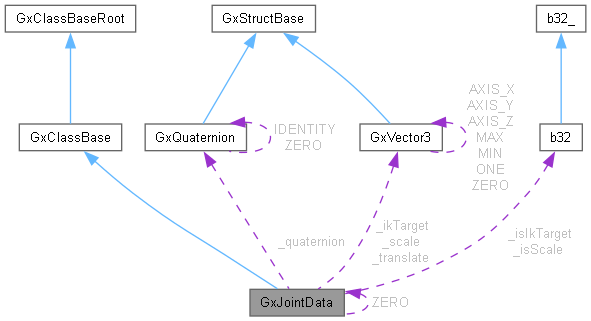
| GxQuaternion | _quaternion |
| 親に相当回転 | |
| GxVector3 | _translate |
| 親に相当位置 | |
| b32 | _isIkTarget |
| _translateはIKエフェクタ座標かフラグ | |
| GxVector3 | _ikTarget |
| IKエフェクタ座標 | |
| b32 | _isScale |
| スケール値使うかフラグ | |
| GxVector3 | _scale |
| スケール値 | |
定義 | |
| static const GxJointData | ZERO = GxJointData(GxQuaternion::ZERO, GxVector3::ZERO, false, GxVector3::ZERO, false, GxVector3::ONE) |
| ゼロデータ定義 | |
| GX_OPERATOR_NEW_DELETE_USE_ARRAY (GxAllocatorList::ALLOCATOR_TYPE::UNIT) | |
Additional Inherited Members | |
| Static Public Member Functions inherited from GxClassBaseRoot | |
| static GX_FORCE_INLINE GxRtti & | __getStaticRtti (void) |
| Rttiの取得 | |
インナークラス(関節のローカルデータを保存するクラス)
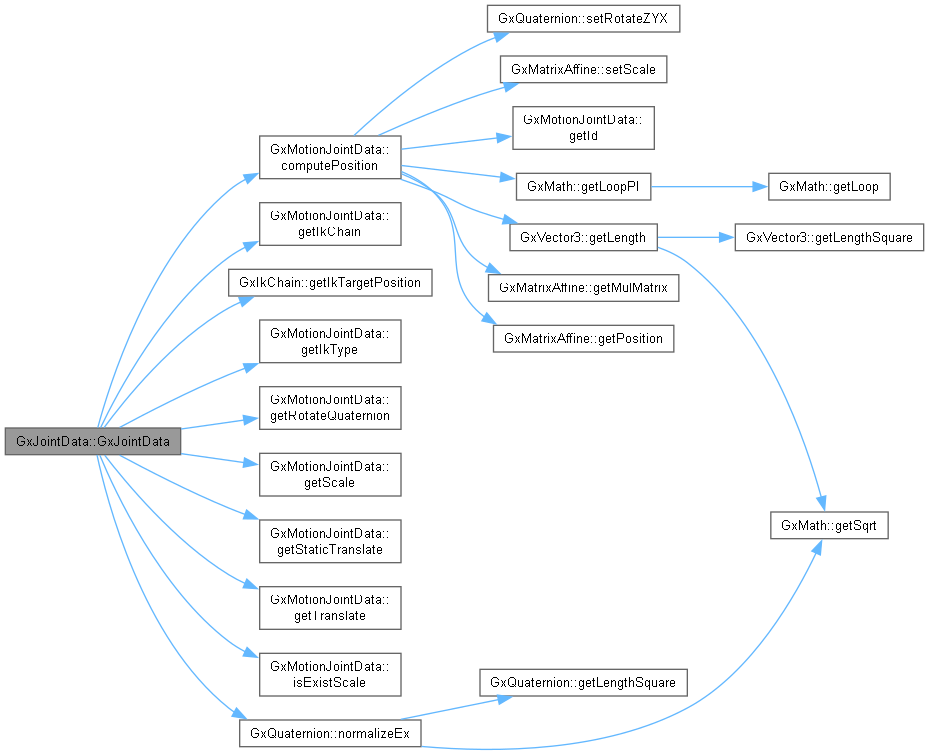
| GxJointData::GxJointData | ( | GxQuaternion const & | quaternion, |
| GxVector3 const & | translate, | ||
| b32 | isIkTarget, | ||
| GxVector3 const & | ikTarget, | ||
| b32 | isScale, | ||
| GxVector3 const & | scale ) |
コピーコンストラクタ
| quaternion | [in] 回転 |
| translate | [in] 移動 |
| isIkTarget | [in] IKターゲットを使用するならtrue |
| ikTarget | [in] IKターゲット |
| isScale | [in] 拡縮を使用するならtrue |
| scale | [in] 拡縮 |
| GxJointData::GxJointData | ( | GxMotionJoint const & | joint | ) |
コピーコンストラクタ
| joint | [in] 関節 |
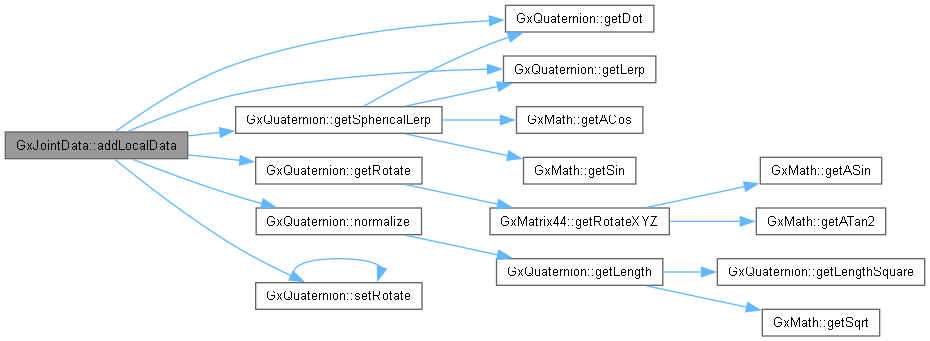
| void GxJointData::addLocalData | ( | GxJointData const & | other, |
| f32 | otherWeight, | ||
| f32 | thisWeight, | ||
| u32 | blendFlags, | ||
| ROTATE_BLEND | rotateBlendType ) |
ローカルデータを足す
| other | [in] 他のブレンドしたい関節配列 |
| otherWeight | [in] 他の関節配列のウェイト |
| thisWeight | [in] この関節配列のウェイト |
| blendFlags | [in] ブレンドフラグ(GxMotionDefineのBLEND_FLAGを使ってください) |
| rotateBlendType | [in] 回転ブレンドの方式 |

| b32 GxJointData::operator!= | ( | GxJointData const & | data | ) | const |
非等価演算子
| data | [in] 比較対象 |
| b32 GxJointData::operator== | ( | GxJointData const & | data | ) | const |
等価演算子
| data | [in] 比較対象 |