|
OROCHI
|

|
|
OROCHI
|
|
モデル対応シミュレーション統合ユニットクラス More...
#include <GxUnitSoftbodySimulation.h>
Public Member Functions | |
初期化 | |
| GxUnitSoftbodySimulation (void) | |
| デフォルトコンストラクタ | |
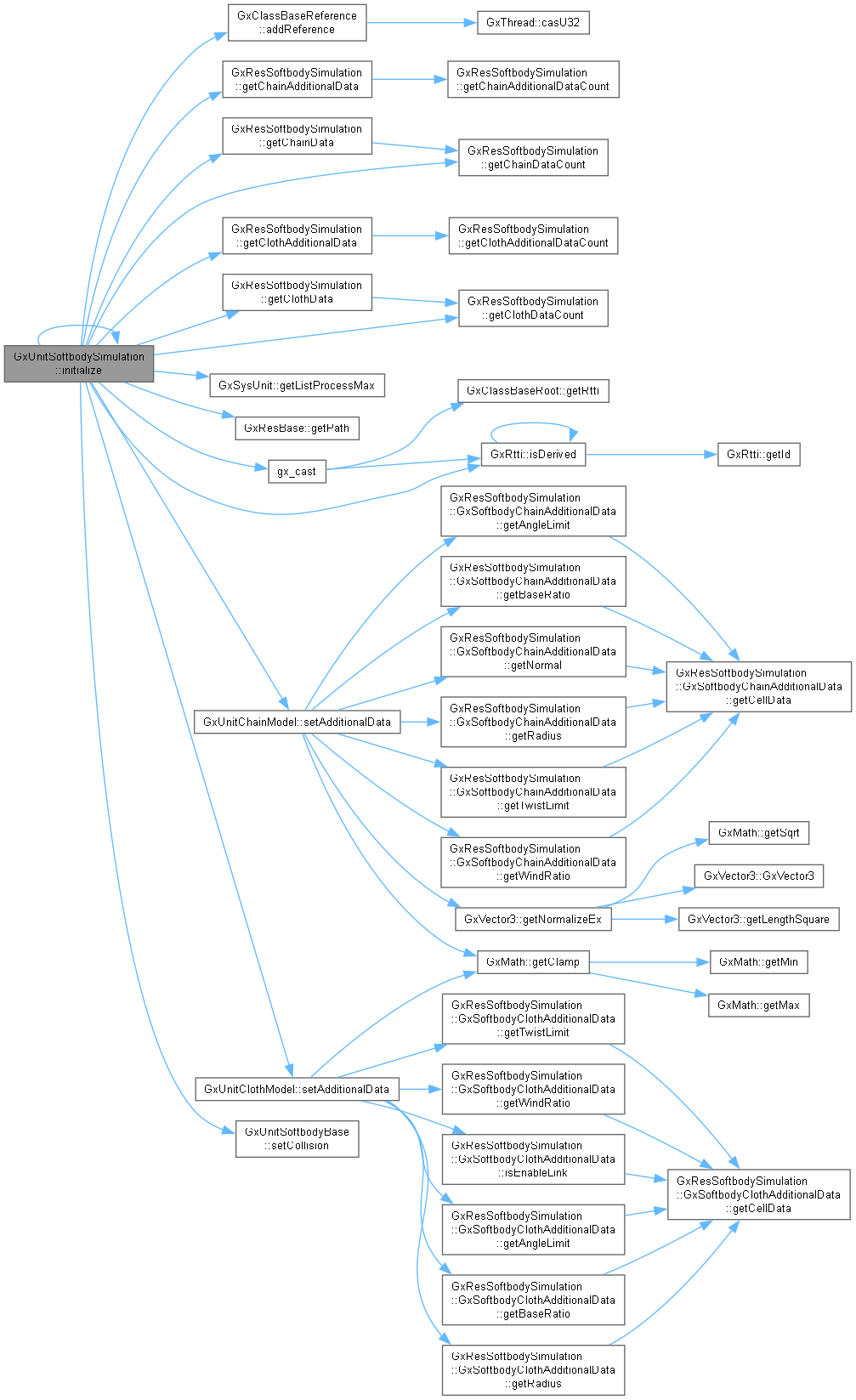
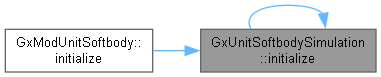
| virtual u32 | initialize (GxResSoftbodySimulation *pResource, GxUnitModelBase *pParent, u32 unitProcessNumber, u32 unitListNumber, GxRtti &chainUnitRtti, GxRtti &clothUnitRtti) |
| 初期化関数、コンストラクタの直後に呼ぶこと | |
| void | cleanup (void) override |
| 解放処理 | |
アクセサ | |
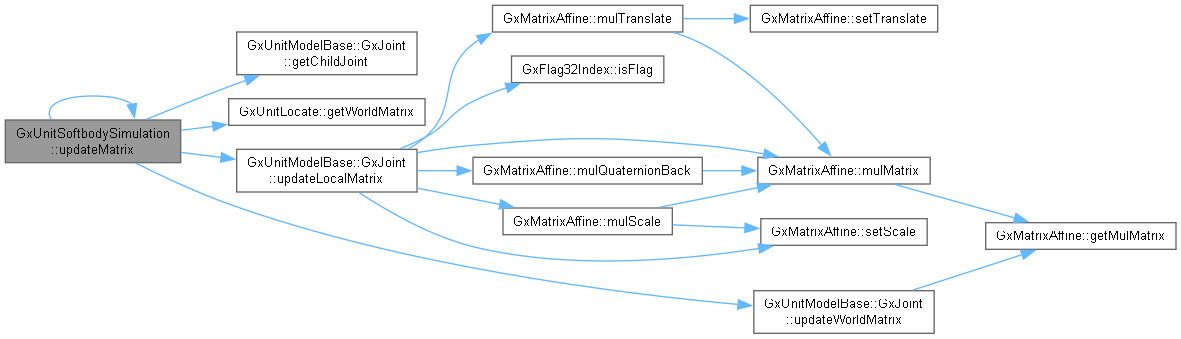
| void | updateMatrix (GxUnitModelBase::GxJoint *pNow) |
| 指定ジョイント以下の全ジョイントの行列を更新 | |
| constexpr u32 | getChainCount (void) const |
| 鎖ユニットの個数取得 | |
| constexpr GxUnitChainModel * | getChainUnit (u32 index) const |
| 指定番号の鎖ユニット取得 | |
| GxUnitChainModel * | getChainUnitFromID (u32 id) const |
| 指定番号の鎖ユニット取得 | |
| constexpr u32 | getClothCount (void) const |
| 布ユニットの個数取得 | |
| constexpr GxUnitClothModel * | getClothUnit (u32 index) const |
| 指定番号の布ユニット取得 | |
| GxUnitClothModel * | getClothUnitFromID (u32 id) const |
| 指定番号の布ユニット取得 | |
| GxUnitSoftbodyCollision * | getCollision (void) const |
| コリジョンユニット取得 | |
| void | setCollision (GxUnitSoftbodyCollision *pCollision) |
| コリジョンユニット設定 | |
| b32 | isSimulation (void) const |
| 有効判定 | |
| b32 | isSimulationChain (u32 index) const |
| 鎖有効判定 | |
| b32 | isSimulationCloth (u32 index) const |
| 布有効判定 | |
| void | setIsSimulation (b32 enable) |
| 有効設定(シミュレーションとモーションを補間して遷移) | |
| b32 | isInterpolateToMotion (void) const |
| シミュレーションからモーションへ補間している状態か判定 | |
| b32 | isInterpolateToMotionChain (u32 index) const |
| 鎖がシミュレーションからモーションへ補間している状態か判定 | |
| b32 | isInterpolateToMotionCloth (u32 index) const |
| 布がシミュレーションからモーションへ補間している状態か判定 | |
| void | forceDisableSimulation (void) |
| シミュレーションを強制終了してモーションへ(補間しない) | |
| f32 | getInterpolateTime (void) const |
| 補間時間の取得(シミュレーション→モーションの補間にかける時間) | |
| void | setInterpolateTime (f32 time) |
| 補間時間の設定(シミュレーション→モーションの補間にかける時間) | |
| b32 | isMotionGravity (void) const |
| 重力を修正してモーションへ収束させるか設定 | |
| void | setIsMotionGravity (b32 enable) |
| 重力を修正してモーションへ収束させるか設定 | |
| void | setMotionGravity (b32 enable, f32 gravityForce, const GxVector3 &gravityDirection=-GxVector3::AXIS_Y) |
| 重力を修正してモーションへ収束させるか設定 - パラメータ変更込み | |
| GX_FORCE_INLINE GxVector3 | getGravity (void) const |
| 重力取得 | |
| void | setGravity (const GxVector3 &gravity) |
| 重力設定 | |
| f32 | getGravityForce (void) const |
| 重力取得(大きさのみ) | |
| void | setGravityForce (f32 force) |
| 重力設定(大きさのみ) | |
| const GxVector3 & | getGravityDirection (void) const |
| 重力取得(方向のみ) | |
| void | setGravityDirection (const GxVector3 &direction) |
| 重力設定(方向のみ) | |
| GX_FORCE_INLINE GxVector3 | getWind (void) const |
| 風取得 | |
| void | setWind (const GxVector3 &wind) |
| 風設定 | |
| f32 | getWindForce (void) const |
| 風力取得 | |
| void | setWindForce (f32 force) |
| 風力設定 | |
| const GxVector3 & | getWindDirection (void) const |
| 風向取得 | |
| void | setWindDirection (const GxVector3 &direction) |
| 風向設定 | |
| GX_FORCE_INLINE b32 | isUpdateAllMatrix (void) const |
| 重力を修正してモーションへ収束させるか設定 | |
| GX_FORCE_INLINE void | setIsUpdateAllMatrix (b32 is) |
| 重力を修正してモーションへ収束させるか設定 | |
 Public Member Functions inherited from GxUnitBase Public Member Functions inherited from GxUnitBase | |
| GxUnitBase (void) | |
| コンストラクタ | |
| constexpr f32 | getDeltaTimeFactor (void) const |
| デルタタイム係数を取得 | |
| constexpr void | setDeltaTimeFactor (f32 deltaTimeFactor) |
| デルタタイム係数を設定 | |
| constexpr f32 | getDeltaTime (void) const |
| デルタタイムを取得 | |
| constexpr void | setDeltaTime (f32 deltaTime) |
| デルタタイムを設定 | |
| constexpr f32 | getDeltaTimeRatio (void) const |
| デルタタイムレート(通常のフレームレートの何倍か)を取得 | |
| constexpr void | setDeltaTimeRatio (f32 deltaTimeRatio) |
| デルタタイムレート(通常のフレームレートの何倍か)を設定 | |
| constexpr STATE | getState (void) const |
| 状態を取得 | |
| constexpr void | setState (STATE state) |
| 状態を設定(ユーザーは使用してはならない内部使用) | |
| GX_FORCE_INLINE b32 | isEnable (void) const |
| 有効か判定 | |
| constexpr u32 | getAttribute (void) const |
| 属性を取得 | |
| GX_FORCE_INLINE b32 | isAttribute (ATTRIBUTE attribute) const |
| 属性を判定 | |
| GX_FORCE_INLINE void | setAttribute (ATTRIBUTE attribute, b32 enable) |
| 属性を設定 | |
| GX_FORCE_INLINE b32 | isRender (void) const |
| 描画フラグ判定 | |
| void | setRender (b32 enable, b32 withChildren=false) |
| 描画フラグを設定 | |
| GX_FORCE_INLINE GxFlag32Index< RENDER_VIEW > | getRenderViewFlag (void) const |
| 描画するビューフラグを取得 | |
| GX_FORCE_INLINE b32 | isRenderView (RENDER_VIEW view) const |
| 描画するビューを判定 | |
| GX_FORCE_INLINE void | setRenderView (RENDER_VIEW view, b32 enable) |
| 描画するビューを設定 | |
| GX_FORCE_INLINE b32 | isRenderSubView (RENDER_SUB_VIEW subView) const |
| 描画するサブビューを判定 | |
| GX_FORCE_INLINE void | setRenderSubView (RENDER_SUB_VIEW subView, b32 enable) |
| 描画するサブビューを設定 | |
| GX_FORCE_INLINE b32 | isUpdateEnable (UPDATE_TYPE updateType) const |
| 更新を呼ぶかを判定 | |
| GX_FORCE_INLINE void | setUpdateEnable (UPDATE_TYPE updateType, b32 enable) |
| 更新を呼ぶかを設定 | |
| GX_FORCE_INLINE void | getPropertyAttributeUpdate (void *const pValue) |
| プロパティ用:更新処理の属性を取得 | |
| GX_FORCE_INLINE void | setPropertyAttributeUpdate (const void *const pValue) |
| プロパティ用:更新処理の属性を設定 | |
| template<typename T > | |
| T * | getModule (void) const |
| モジュールを取得 | |
| constexpr u32 | getChildCount (void) const |
| 子ユニット数を取得 | |
| constexpr GxUnitBase * | getChild (u32 index) const |
| 子ユニットを取得 | |
| constexpr GxUnitBase * | getParent (void) const |
| 親ユニットを取得 | |
| void | setParent (GxUnitBase *pParent) |
| 親ユニットを設定 | |
| constexpr GxResUnitInstance * | getResUnitInstance (void) const |
| ユニットインスタンスリソースを取得 | |
| void | setResUnitInstance (GxResUnitInstance *pResUnitInstance) |
| ユニットインスタンスリソースを設定 | |
| constexpr void | getPropertyResUnitInstance (void *const pValue) |
| ユニットインスタンスリソースプロパティの取得 | |
| void | setPropertyResUnitInstance (const void *const pValue) |
| ユニットインスタンスリソースプロパティの設定 | |
| GX_FORCE_INLINE const GxTypedObject * | getDefaultObject (void) override |
| デフォルトオブジェクトを取得 | |
| constexpr GxUnitBase * | getDefaultUnit (void) const |
| デフォルトユニットを取得 | |
| void | setDefaultUnit (GxUnitBase *pDefaultUnit) |
| デフォルトユニットを設定 | |
| void | sleep (f32 time) |
| スリープ(スクリプト用) | |
| template<typename T > | |
| T * | createAndAddChild (u32 listProcessNumber=U32_MAX, u32 listKindNumber=U32_MAX, b32 isSerialize=false, const GxRtti *pRtti=nullptr) |
| 子ユニットを追加作成 | |
| Public Member Functions inherited from GxClassBaseReference | |
| GxClassBaseReference (void) | |
| コンストラクタ | |
| GxClassBaseReference (const GxClassBaseReference &base) | |
| コピーコンストラクタ | |
| ~GxClassBaseReference (void) override | |
| デストラクタ | |
| constexpr GxClassBaseReference & | operator= (const GxClassBaseReference &base) |
| 代入演算子 | |
| virtual s32 | addReference (void) |
| 参照カウンタを加算 | |
| virtual s32 | release (void) |
| 解放 | |
| virtual s32 | getReferenceCount (void) const |
| 参照カウンタを取得 | |
| constexpr void | setDelayReleaseCount (s32 count) |
| 遅延解放カウンタを設定 | |
| void | setDelayReleaseCountInfinity (b32 on) |
| 無限解放待ちの設定 | |
| Public Member Functions inherited from GxClassBaseRoot | |
| constexpr | GxClassBaseRoot (void) |
| コンストラクタ | |
| constexpr | GxClassBaseRoot (const GxClassBaseRoot &) |
| コピーコンストラクタ | |
| virtual | ~GxClassBaseRoot (void) |
| デストラクタ | |
| constexpr GxClassBaseRoot & | operator= (const GxClassBaseRoot &) |
| 代入演算子 | |
| virtual GxRtti & | getRtti (void) const =0 |
| Rttiの取得 | |
| GX_FORCE_INLINE b32 | isDefaultObject (void) |
| デフォルトオブジェクト判定 | |
Protected Attributes | |
メンバ変数 | |
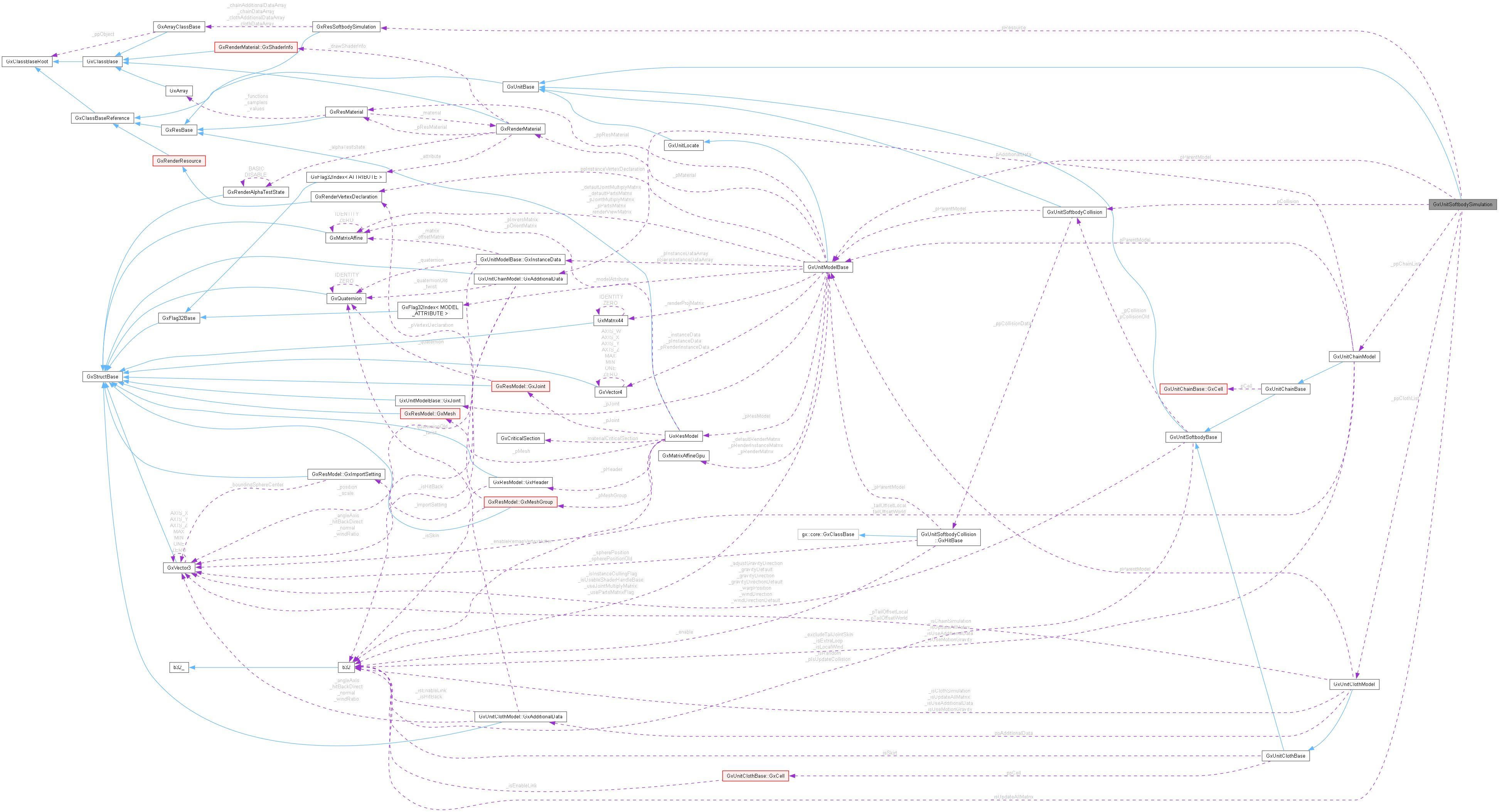
| GxResSoftbodySimulation * | _pResource |
| シミュレーションリソース | |
| GxUnitModelBase * | _pParentModel |
| シミュレートするモデル | |
| GxUnitChainModel ** | _ppChainList |
| チェーンシミュレーションユニットリスト | |
| GxUnitClothModel ** | _ppClothList |
| クロスシミュレーションユニットリスト | |
| u32 | _chainCount |
| チェーンシミュレーション数 | |
| u32 | _clothCount |
| クロスシミュレーション数 | |
| b32 | _isUpdateAllMatrix |
| 全関節行列更新するかフラグ // for 枝分かれ関節 | |
| GxUnitSoftbodyCollision * | _pCollision |
| シミュレーションが使用するコリジョン | |
| Protected Attributes inherited from GxClassBaseReference | |
| s32 | _referenceCount |
| 参照カウンタ | |
| s32 | _delayReleaseCount |
| 遅延解放カウンタ | |
操作 | |
| void | kill (void) override |
| ユニットの消去リクエスト | |
| void | asyncUpdate (void) override |
| 非同期更新 | |
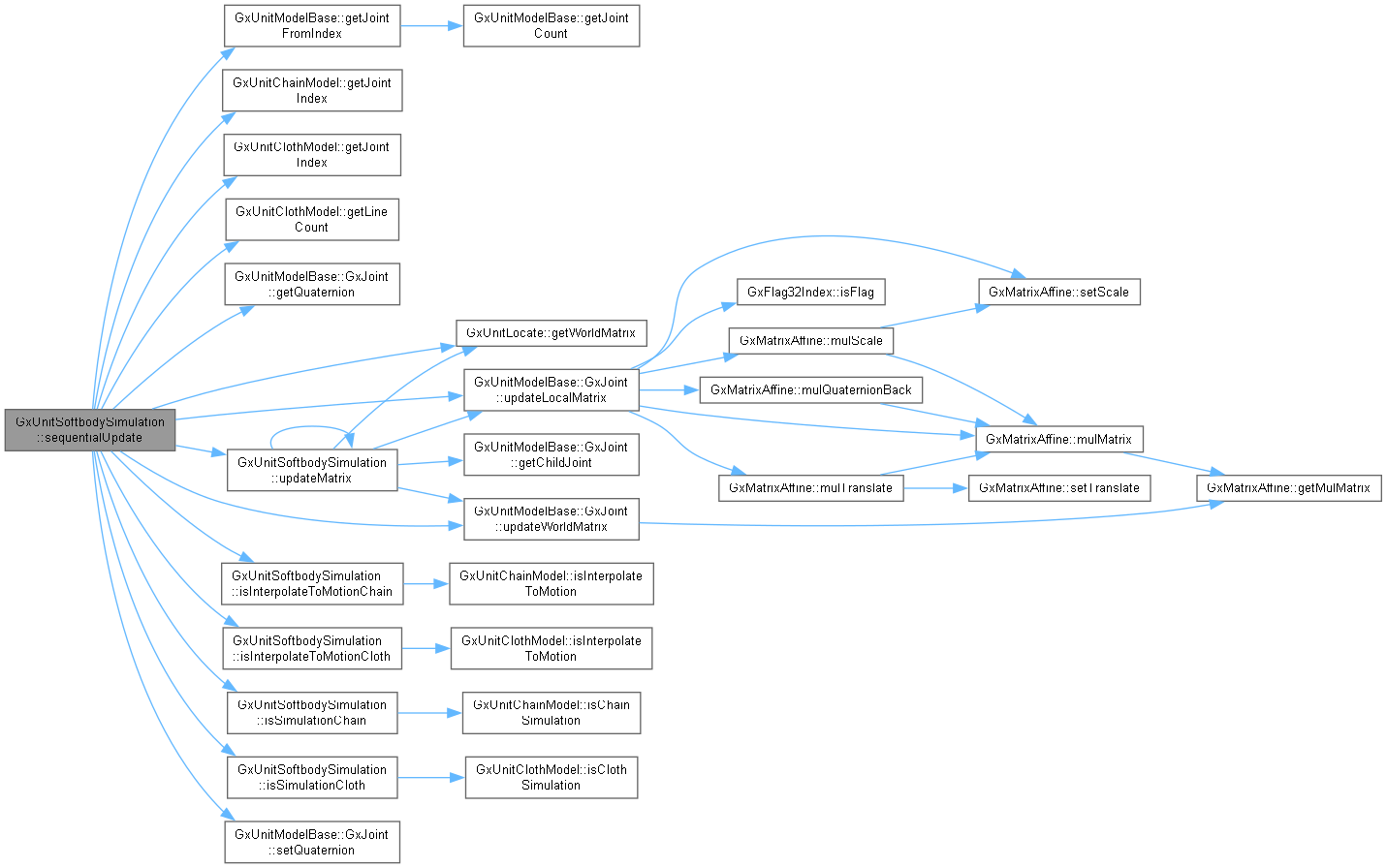
| void | sequentialUpdate (void) override |
| 同期更新 | |
Additional Inherited Members | |
| Public Types inherited from GxUnitBase | |
| enum class | STATE { SETUP , RUNNING , DELETE_ } |
| 状態 More... | |
| enum | ATTRIBUTE { ATTRIBUTE_UPDATE = (1 << 0) , ATTRIBUTE_SELECTED = (1 << 1) , ATTRIBUTE_LOCK = (1 << 2) , ATTRIBUTE_SLOW = (1 << 3) , ATTRIBUTE_NOSERIALIZE = (1 << 4) } |
| 属性 More... | |
| Static Public Member Functions inherited from GxClassBaseReference | |
| static void | initializeDelayRelease (void) |
| 遅延解放リストの初期化 | |
| static void | terminateDelayRelease (void) |
| 遅延解放リストの終了 | |
| static void | updateDelayRelease (void) |
| 遅延解放リストの更新 | |
| static b32 | isDelayReleaseEnable (void) |
| 遅延解放システムの有効判定 | |
| static u32 | getDelayReleaseListCount (void) |
| 遅延解放待ちの数を取得 | |
| Static Public Member Functions inherited from GxClassBaseRoot | |
| static GX_FORCE_INLINE GxRtti & | __getStaticRtti (void) |
| Rttiの取得 | |
| Static Public Attributes inherited from GxClassBaseReference | |
| static constexpr s32 | DELAY_RELEASE_COUNT_INFINITY = -1 |
| 遅延解放の無限待ち定義 | |
| Protected Member Functions inherited from GxUnitBase | |
| virtual b32 | setup (void) |
| セットアップ(初回にasyncUpdate前に一回呼ばれる) | |
| virtual void | preAsyncUpdate (void) |
| 並列更新(asyncUpdateの前に実行される) | |
| virtual void | postAsyncUpdate (void) |
| 並列更新(asyncUpdateの後に実行される) | |
| virtual void | forceAsyncUpdate (void) |
| 強制並列更新(pause中も実行) | |
| virtual void | render (void) |
| 描画 | |
| virtual b32 | setRenderMaterial (GxRenderMaterial *pMaterial, const GxResModel::GxMeshGroup *pMeshGroup) |
| マテリアルの描画設定 | |
| template<typename T > | |
| T * | addModule (void) |
| モジュールを作成 | |
| template<typename T > | |
| void | removeModule (void) |
| モジュールを削除 | |
モデル対応シミュレーション統合ユニットクラス
|
overrideprotectedvirtual |
|
overridevirtual |
解放処理
Reimplemented from GxUnitBase.
| GxUnitChainModel * GxUnitSoftbodySimulation::getChainUnitFromID | ( | u32 | id | ) | const |
指定番号の鎖ユニット取得
| id | [in] ID |
| GxUnitClothModel * GxUnitSoftbodySimulation::getClothUnitFromID | ( | u32 | id | ) | const |
指定番号の布ユニット取得
| id | [in] ID |
| const GxVector3 & GxUnitSoftbodySimulation::getGravityDirection | ( | void | ) | const |
重力取得(方向のみ)

| f32 GxUnitSoftbodySimulation::getGravityForce | ( | void | ) | const |
重力取得(大きさのみ)

| f32 GxUnitSoftbodySimulation::getInterpolateTime | ( | void | ) | const |
補間時間の取得(シミュレーション→モーションの補間にかける時間)
| 補間時間 |

| f32 GxUnitSoftbodySimulation::getWindForce | ( | void | ) | const |
風力取得

|
virtual |
初期化関数、コンストラクタの直後に呼ぶこと
| pResource | [in] シミュレーションリソース |
| pParent | [in] シミュレーションさせるモデル |
| unitProcessNumber | [in] シミュレーションユニットを登録する処理番号 |
| unitListNumber | [in] シミュレーションユニットを登録するリスト番号 |
| chainUnitRtti | [in] 鎖ユニットのRTTI |
| clothUnitRtti | [in] 布ユニットのRTTI |
| b32 GxUnitSoftbodySimulation::isInterpolateToMotionChain | ( | u32 | index | ) | const |
鎖がシミュレーションからモーションへ補間している状態か判定
| index | [in] インデックス |


| b32 GxUnitSoftbodySimulation::isInterpolateToMotionCloth | ( | u32 | index | ) | const |
布がシミュレーションからモーションへ補間している状態か判定
| index | [in] インデックス |


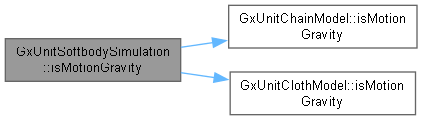
| b32 GxUnitSoftbodySimulation::isMotionGravity | ( | void | ) | const |
重力を修正してモーションへ収束させるか設定
| 重力が変動してモーションへ収束するならtrue |
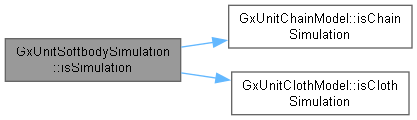
| b32 GxUnitSoftbodySimulation::isSimulation | ( | void | ) | const |
有効判定
| b32 GxUnitSoftbodySimulation::isSimulationChain | ( | u32 | index | ) | const |
鎖有効判定
| index | [in] インデックス |


| b32 GxUnitSoftbodySimulation::isSimulationCloth | ( | u32 | index | ) | const |
布有効判定
| index | [in] インデックス |


|
overridevirtual |
ユニットの消去リクエスト
Reimplemented from GxUnitBase.
|
overrideprotectedvirtual |
| void GxUnitSoftbodySimulation::setCollision | ( | GxUnitSoftbodyCollision * | pCollision | ) |
コリジョンユニット設定
| pCollision | [in] コリジョン |

| void GxUnitSoftbodySimulation::setGravity | ( | const GxVector3 & | gravity | ) |
重力設定
| gravity | [in] 重力 |
| void GxUnitSoftbodySimulation::setGravityDirection | ( | const GxVector3 & | direction | ) |
重力設定(方向のみ)
| direction | [in] 重力方向 |


| void GxUnitSoftbodySimulation::setGravityForce | ( | f32 | force | ) |
重力設定(大きさのみ)
| force | [in] 重力 |


| void GxUnitSoftbodySimulation::setInterpolateTime | ( | f32 | time | ) |
補間時間の設定(シミュレーション→モーションの補間にかける時間)
| time | [in] 補間時間 |

| void GxUnitSoftbodySimulation::setIsMotionGravity | ( | b32 | enable | ) |
重力を修正してモーションへ収束させるか設定
| enable | [in] 有効ならtrue |
| void GxUnitSoftbodySimulation::setIsSimulation | ( | b32 | enable | ) |
有効設定(シミュレーションとモーションを補間して遷移)
正確には、モーションからシミュレーションに切り替わる際は、モーションの姿勢を初期値とするため補間はない
シミュレーションからモーションへ切り替える場合のみ現在の姿勢からモーションの姿勢まで回転を時間線形に球面補間する
| enable | [in] 有効ならtrue |

| void GxUnitSoftbodySimulation::setMotionGravity | ( | b32 | enable, |
| f32 | gravityForce, | ||
| const GxVector3 & | gravityDirection = -GxVector3::AXIS_Y ) |
重力を修正してモーションへ収束させるか設定 - パラメータ変更込み
setMotionGravity の第一引数に true を与えると、重力方向は設定パラメータに因らず、 モデル関節のモーションで指定された方向へ重力を向ける
大きさは第二引数で与えられた値を用いる
また、第一引数に false が与えられた場合、第三引数で鉛直方向以外の重力方向を設定可能
この方向は、すべての質点に同等の向きを与える(個別設定不可)
| enable | [in] 有効ならtrue |
| gravityForce | [in] 重力 |
| gravityDirection | [in] 重力方向 |

| void GxUnitSoftbodySimulation::setWind | ( | const GxVector3 & | wind | ) |
風設定
| wind | [in] 風向き |
| void GxUnitSoftbodySimulation::setWindDirection | ( | const GxVector3 & | direction | ) |
風向設定
| direction | [in] 風向き |


| void GxUnitSoftbodySimulation::setWindForce | ( | f32 | force | ) |
風力設定
| force | [in] 風力 |


| void GxUnitSoftbodySimulation::updateMatrix | ( | GxUnitModelBase::GxJoint * | pJointNow | ) |
指定ジョイント以下の全ジョイントの行列を更新
| pJointNow | [in] 関節 |