|
OROCHI
|

|
|
OROCHI
|
|
GxMotionJointのローカルデータだけを保存するクラス More...
#include <GxMotionJoint.h>
Public Member Functions | |
初期化 | |
| GxMotionJointData (void) | |
| デフォルトコンストラクタ | |
| ~GxMotionJointData (void) override | |
| デストラクタ | |
基本処理 | |
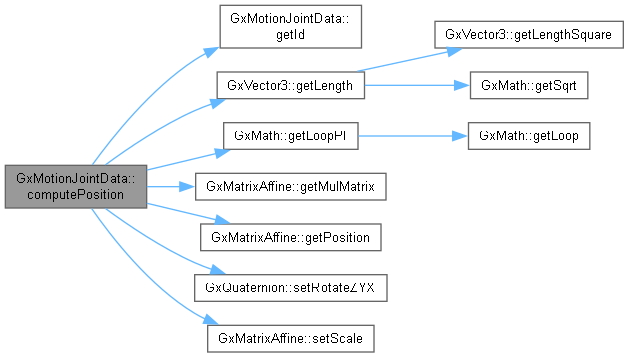
| GxVector3 & | computePosition (GxVector3 &jointPosition) const |
| IK計算の為の座標を計算/取得 | |
アクセサ | |
| constexpr GxMotionJointData const * | getParent (void) const |
| 親ジョイントポインタ | |
| GX_FORCE_INLINE const GxVector3 & | getStaticTranslate (void) const |
| ベースポーズで親ジョイントからの相対座標を取得 | |
| GX_FORCE_INLINE const GxQuaternion & | getBasePoseQuaternion (void) const |
| ベースポーズのワールド回転を取得 | |
| GxQuaternion | getBasePoseLocalRotate (void) const |
| ベースポーズのローカル回転を取得 | |
| GX_FORCE_INLINE const GxVector3 | getTranslate (void) const |
| 親ジョイントからの相対座標を取得 | |
| void | setTranslate (GxVector3 const &translate) |
| 親ジョイントからの相対座標を設定 | |
| GX_FORCE_INLINE const GxQuaternion & | getRotateQuaternion (void) const |
| 親ジョイントからの相対角度を取得 | |
| GX_FORCE_INLINE void | setRotateQuaternion (GxQuaternion const &rotate) |
| 親ジョイントからの相対角度を設定 | |
| GX_FORCE_INLINE const GxVector3 & | getScale (void) const |
| スケールを取得 | |
| GX_FORCE_INLINE void | setScale (GxVector3 const &scale) |
| スケールを設定 | |
| GX_FORCE_INLINE b32 | isExistScale (void) const |
| スケールデータが存在するか | |
| GX_FORCE_INLINE void | setExistScale (b32 scaleExist) |
| スケールデータが存在するか設定 | |
| constexpr s32 | getId (void) const |
| IDを取得 | |
| constexpr IK | getIkType (void) const |
| IKの種類を取得 | |
| constexpr GxIkChain const * | getIkChain (void) const |
| IKチェーンアドレスを取得 | |
| constexpr GxIkChain * | getIkChain (void) |
| IKチェーンアドレスを取得 | |
| constexpr void | getPropertyNonConstParent (void *const pValue) |
| 親関節を取得 | |
| constexpr void | setPropertyDummyParent (const void *const) |
| 親関節を設定 | |
 Public Member Functions inherited from GxClassBase Public Member Functions inherited from GxClassBase | |
| constexpr | GxClassBase (void) |
| コンストラクタ | |
| constexpr | GxClassBase (const GxClassBase &base) |
| コピーコンストラクタ | |
| ~GxClassBase (void) override | |
| デストラクタ | |
| Public Member Functions inherited from GxClassBaseRoot | |
| constexpr | GxClassBaseRoot (void) |
| コンストラクタ | |
| constexpr | GxClassBaseRoot (const GxClassBaseRoot &) |
| コピーコンストラクタ | |
| virtual | ~GxClassBaseRoot (void) |
| デストラクタ | |
| constexpr GxClassBaseRoot & | operator= (const GxClassBaseRoot &) |
| 代入演算子 | |
| virtual GxRtti & | getRtti (void) const =0 |
| Rttiの取得 | |
| virtual GX_FORCE_INLINE const GxTypedObject * | getDefaultObject (void) |
| デフォルトオブジェクトを取得 | |
| GX_FORCE_INLINE b32 | isDefaultObject (void) |
| デフォルトオブジェクト判定 | |
定義 | |
| enum class | IK { NO , CHAIN , CHAIN_START = CHAIN , JOINT , CHAIN_MIDDLE = JOINT , EFFECTOR , CHAIN_END = EFFECTOR , EFFECTOR_RIGHT , SKIP_CALCULATE , MAX } |
| 関節IKタイプ More... | |
| class | GxModUnitMotionBase |
| class | GxMotionPlayer |
| class | GxModUnitMotionBlend |
| class | GxMotionNodeDataReader |
メンバ変数 | |
| GxMotionJointData const * | _pParent |
| 親ジョイントポインタ | |
Additional Inherited Members | |
| Static Public Member Functions inherited from GxClassBaseRoot | |
| static GX_FORCE_INLINE GxRtti & | __getStaticRtti (void) |
| Rttiの取得 | |
GxMotionJointのローカルデータだけを保存するクラス
|
strong |
IK計算の為の座標を計算/取得
| jointPosition | [out] 座標 |

| GxQuaternion GxMotionJointData::getBasePoseLocalRotate | ( | void | ) | const |
ベースポーズのローカル回転を取得


| void GxMotionJointData::setTranslate | ( | GxVector3 const & | translate | ) |
親ジョイントからの相対座標を設定
| translate | [in] 相対座標 |
