|
OROCHI
|

|
|
OROCHI
|
|
#include <GxCollision.h>
Public Member Functions | |
初期化 | |
| GxConvexCallback (const btVector3 &rayFromWorld, const btVector3 &rayToWorld, GxConditionInformation *pConditionInfo) | |
| コンストラクタ | |
操作 | |
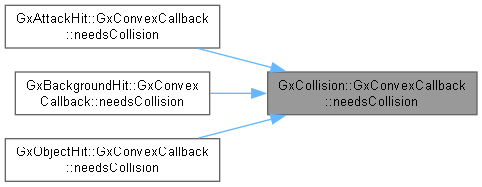
| bool | needsCollision (btBroadphaseProxy *pProxy) const override |
| btScalar | addSingleResult (btCollisionWorld::LocalConvexResult &convexResult, bool normalInWorldSpace) override |
Public Attributes | |
メンバ変数 | |
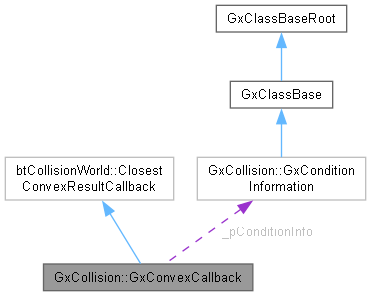
| GxConditionInformation * | _pConditionInfo |
| レイチェック判定条件構造体 | |
| u32 | _triangleIndex |
| メッシュ形状とヒットしたときのヒットした三角形index | |
カプセルチェック用コールバック構造体:最も近い結果を返す
|
override |
ヒット時の処理 レイがヒットした場合、この関数が呼ばれます。 この関数内で、最も近い結果以外をブロックする必要があります。
| convexResult | [in] ローカルのカプセルチェックの結果 |
| normalInWorldspace | [in] 法線がワールド座標系ならtrue |
|
override |
早期終了チェック処理 Bullet内部から詳細判定に入る前に呼ばれます。 ここでGxConditionInformationを利用した早期終了チェックを行います。 グループとマスクによる判定もこの関数内で行われます。 この時点ではチェック中のメッシュのindexは取得できません。
| pProxy0 | [in] プロキシ |